

AVSimulation est fier d’annoncer que SCANeR 2023.1, la dernière version majeure de notre logiciel de simulation automobile, est désormais disponible. Elle comprend de nombreuses nouvelles fonctionnalités et améliorations pour répondre aux besoins des applications de simulation les plus complexes pour les ingénieurs et les scientifiques.
Ces nouvelles fonctionnalités aideront à résoudre les défis du développement, des tests et de l’évaluation des fonctions de conduite autonome et avancée grâce à une utilisation intensive de la simulation tout au long du processus de RD.
Les principaux sujets de cette nouvelle version sont le support d’OpenScenario, l’amélioration de notre nouveau terrain, une fonctionnalité multijoueur expérimentale, le support du casque Varjo XR3 et un nouveau packaging NCAP.
Comme toujours, SCANeR 2023.2 est compatible avec les solutions matérielles et logicielles les plus performantes disponibles sur le marché de la simulation.
POINTS FORTS
Parmi les nombreuses améliorations, évolutions et nouvelles fonctionnalités, vous trouverez ci-dessous une sélection de fonctionnalités d’un intérêt particulier pour vos cas d’utilisation tels que les ADAS, la conduite autonome, la simulation massive, les phares, la réalité virtuelle et augmentée, les tests HIL/VIL, ainsi que l’intégration et la supervision des simulateurs de conduite.
Les principales fonctionnalités de cette nouvelle version sont :
- Support d’ASAM OpenScenario
- Amélioration de notre nouvel éditeur de terrain avec des styles de routes
- Fonctionnalité multijoueur expérimentale pour connecter des simulateurs de conduite distants
- Le moteur UXD prend désormais en charge les expériences VR/XR avec le casque Varjo XR3
- Nombreuses corrections de bugs pour améliorer les performances et la stabilité
GÉNÉRAL
Introduction
Cette release note décrit les nouvelles fonctionnalités et évolutions disponibles dans SCANeR 2023.2.
En ce qui concerne la nouvelle structuration de SCANeR, les nouvelles fonctionnalités énumérées dans les paragraphes suivants sont regroupées par Pack :
- Foundation rassemble les fonctionnalités standards de SCANeR pour créer des modèles, intégrer des systèmes, simuler et analyser les résultats
- Packs liés au domaine d’application : AD/ADAS, capteurs basés sur la physique, phares, véhicules dynamique, véhicules spéciaux, facteurs humains
- Packs liés au banc de simulation : cibles en temps réel, simulation massive, simulateurs
- Contenu supplémentaire : NCAP Réglementation, environnements 3D
- Autres applications : éducation, simulation de formation


corrections de bug
Cette version de SCANeR inclut également tous les correctifs et améliorations des versions précédentes, y compris SCANeR 2022.2, 2023.1 et les versions spécifiques aux clients.
FONDATION
Mode TERRAIN
Nouvelles fonctionnalités
Ergonomie : éditeur de styles de route
Dans cette nouvelle version, nous avons introduit le concept de styles de route. Les styles de route permettent aux utilisateurs de définir l’apparence d’une portion de route.
Tous les styles de route sont disponibles dans le panneau des ressources. Chaque style de route peut être glissé-déposé sur une voie pour être appliqué directement. Les utilisateurs peuvent définir leurs propres styles de route ou modifier les styles existants en cliquant avec le bouton droit ou en double-cliquant sur un style de route.
Les utilisateurs peuvent définir le style de route par défaut. Celui-ci sera utilisé pour toutes les nouvelles créations de routes.
Les utilisateurs peuvent également appliquer un style de route à différents segments à l’aide d’un outil « Appliquer ».
Il est aussi possible de sélectionner plusieurs portions pour appliquer des styles de route.
Moteur UXD (powered par Unreal)
Remarque : Le moteur UXD n’est pas encore capable de couvrir tous les cas d’utilisation de SCANeR. Pour cette raison, le module VISUAL d’origine, basé sur Open Scene Graph, est toujours disponible.
Nouvelles fonctionnalités
Application VR/XR
- Ces fonctionnalités nécessitent des réglages spécifiques :
- Requiert une connaissance de l’intégration Unreal et Varjo-XR3.
SCANeR est désormais compatible avec OpenXR et le Varjo-XR3.
Le fichier de configuration UXDRender a été mis à jour avec les nouvelles fonctionnalités de réalité mixte du Varjo-XR3, notamment :
- Chroma key : mélangez les flux vidéo du monde réel avec les scènes 3D en remplaçant une couleur chroma spécifiée par des scènes du monde 3D.

- Occlusion de profondeur : mélangez les flux vidéo du monde réel avec des scènes 3D en comparant le tampon de profondeur du monde 3D aux données de profondeur LIDAR du Varjo-XR3.

- Masquage : mélangez les flux vidéo du monde réel avec des scènes 3D en utilisant des actifs de masque placés dans le monde 3D.

Cockpits
Nous avons ajouté une nouvelle fonctionnalité permettant d’importer des modèles CAO en tant que postes de pilotage dans SCANeR.
Les utilisateurs fournissent un fichier manifeste (.json) contenant les informations nécessaires pour conduire le processus de conversion, qui produira un poste de pilotage SCANeR sous forme de fichier .xcpt, fichier .pak et un actif 3D de remplacement pour le module CockpitEditor.
La fonctionnalité est disponible dans le plugin SCANeRToolBar pour Unreal Engine et peut être utilisée de deux manières :
- Par le biais d’un commandlet
- Avec Unreal Editor
La conversion utilise la fonctionnalité Dataprep d’Unreal Engine pour traiter et optimiser les modèles CAO afin de les adapter au mieux à SCANeR.
Mode Simulation
Nouvelles fonctionnalités
KPI
Cette nouvelle version permet aux utilisateurs de définir et de calculer des KPI pour la simulation, afin d’analyser le comportement du véhicule ou du système testé.
Un nouveau bouton est disponible dans la barre d’outils de SCANeR Studio pour configurer les KPI, et sélectionner la configuration KPI à utiliser dans la simulation.

Une configuration KPI liste les KPI à calculer avec les paramètres spécifiés. Les KPI peuvent être choisis parmi les valeurs par défaut ou des KPI personnalisés peuvent être créés.

La configuration KPI sélectionnée sera calculée pendant la simulation et les résultats seront produits dans le dossier d’enregistrement.
Support d’OpenScenario
Cette nouvelle version prend en charge l’importation et la simulation de scénarios réalisés avec le standard OpenScenario.
La version supportée d’OpenScenario est 1.2 (OpenScenario 2.0 n’est pas encore supporté).
SCANeR fournit un outil pour importer des fichiers OpenScenario, ainsi qu’un nouveau module pour exécuter le script dynamique OpenScenario pendant la simulation.

Améliorations des paramètres d’exploration
Le concept des paramètres d’exploration a été amélioré : les utilisateurs peuvent désormais associer plusieurs variables de scénario à un paramètre d’exploration. Par exemple, un seul paramètre d’exploration peut être utilisé pour définir une variable qui fixe la même vitesse initiale pour tous les véhicules du scénario.
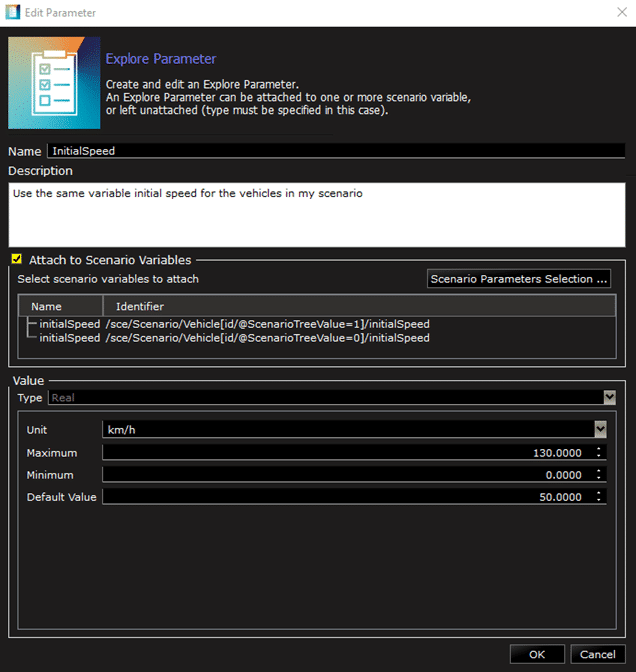
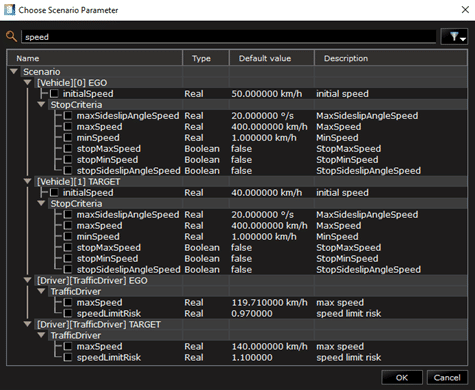
L’interface graphique pour la définition des paramètres d’exploration a été améliorée, avec l’ajout d’une barre de recherche et d’options de filtrage.
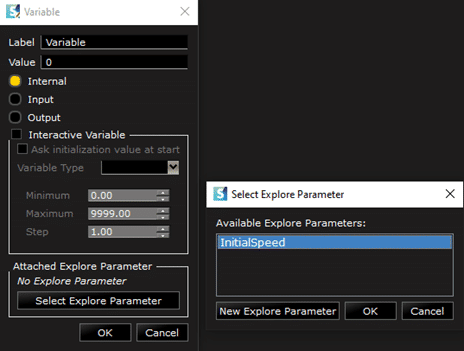
Nous avons également ajouté un raccourci dans l’éditeur MICE pour attacher facilement une variable MICE à un paramètre d’exploration.
CAPTEURS
SORTIES DE CAPTEURS
Plugin Lidar, caméra et radar
Une nouvelle API de plugin de capteurs a été développée, permettant un accès simplifié aux sorties des capteurs en dehors de SCANeR. Elle est accessible via l’interface de sortie des capteurs habituelle, en sélectionnant le plugin dans une liste :
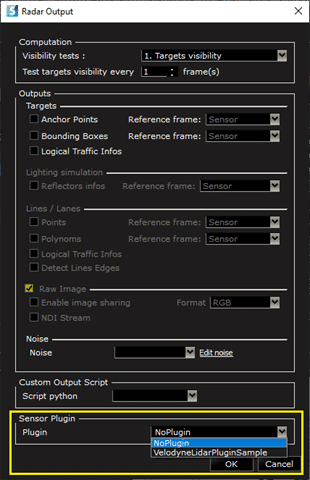
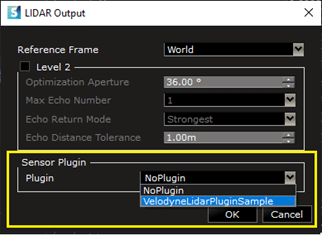
Cette API offre une méthode puissante pour extraire les données des capteurs de SCANeR sans utiliser l’API SCANeR, par exemple pour tracer des nuages de points Lidar dans un outil de visualisation dédié.

DYNAMIQUE DU VÉHICULE
MODE VÉHICULE
Réglage et visualisation des courbes
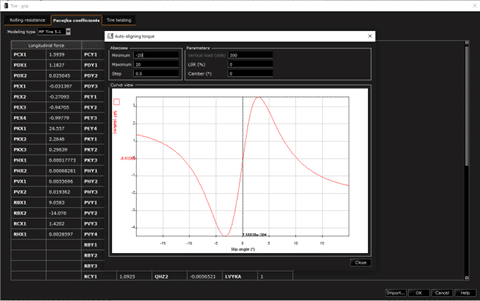
Modèles de pneus Pacejka
Pour faciliter le réglage des modèles de pneus Pacejka, un graphique des forces longitudinales/latérales et du couple auto-alignant peut désormais être tracé :
Rééchantillonnage des données de courbes 1-D
Pour permettre à l’utilisateur d’ajouter plus de données dans une table existante, une fonctionnalité spécifique de rééchantillonnage des données d’entrée a été ajoutée.

NOUVELLE FONCTIONNALITÉ :
Simulation multijoueur (expérimentale)
Cette nouvelle fonctionnalité de SCANeR Studio 2023.2 permet aux utilisateurs situés dans différents endroits de partager le même scénario et de lancer la même simulation ensemble, chacun conduisant son propre véhicule avec son propre simulateur.
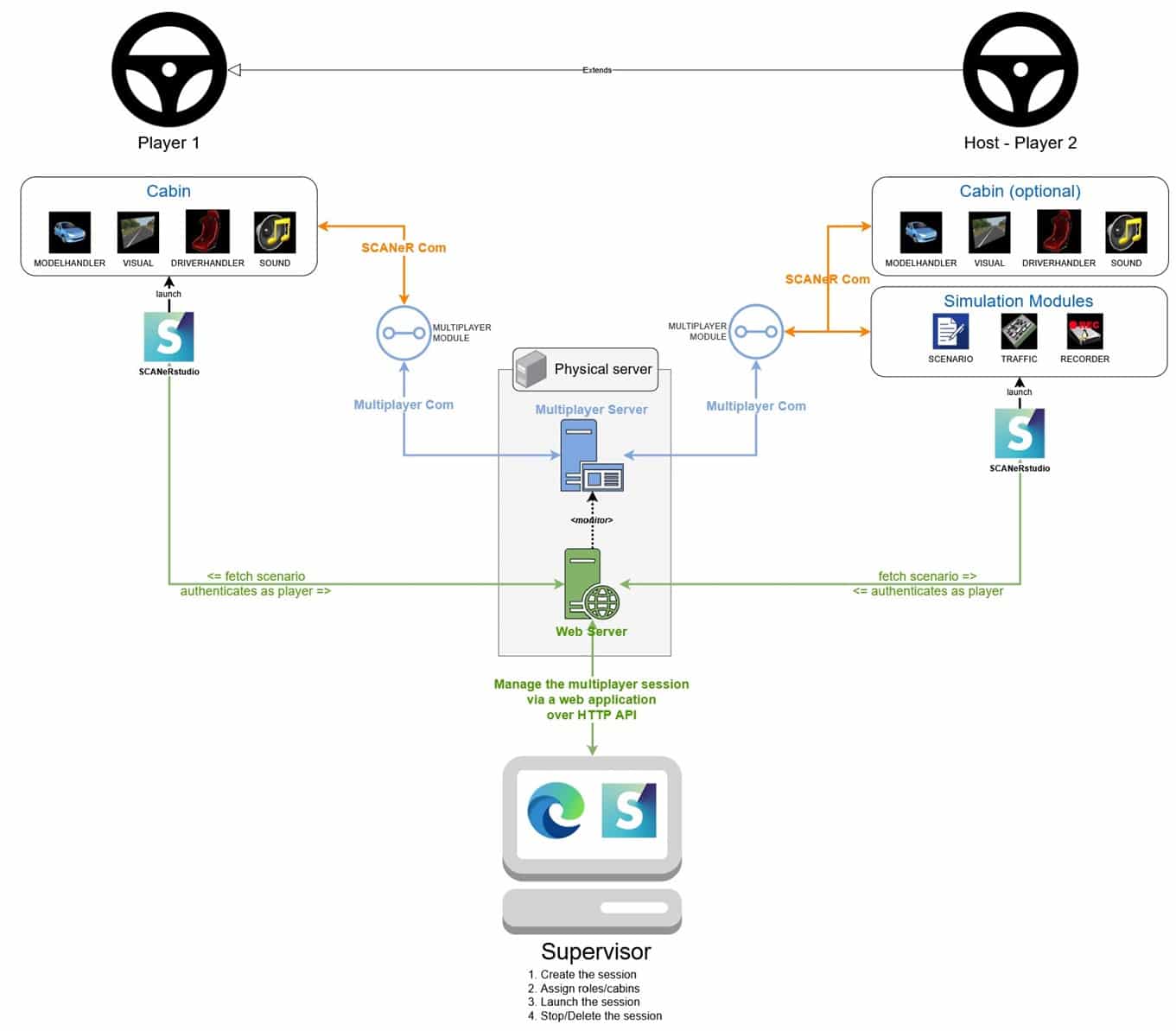
Nous fournissons une petite application web pour créer et héberger le serveur utilisé par la simulation multijoueur. Les participants peuvent rejoindre une session ouverte, sélectionner un véhicule à conduire et télécharger le scénario.
Une fois tous les participants prêts, ils peuvent démarrer la simulation dans SCANeR Studio et lancer le nouveau module Multijoueur pour exécuter une simulation multijoueur.
Cette fonctionnalité est expérimentale et nécessite une licence spécifique. Si vous êtes intéressé par une évaluation ou un devis, veuillez contacter votre représentant commercial.
NCAP RÉGLEMENTATIONS

MISE À JOUR 2023.2 DU PACK NCAP RÉGLEMENTATIONS
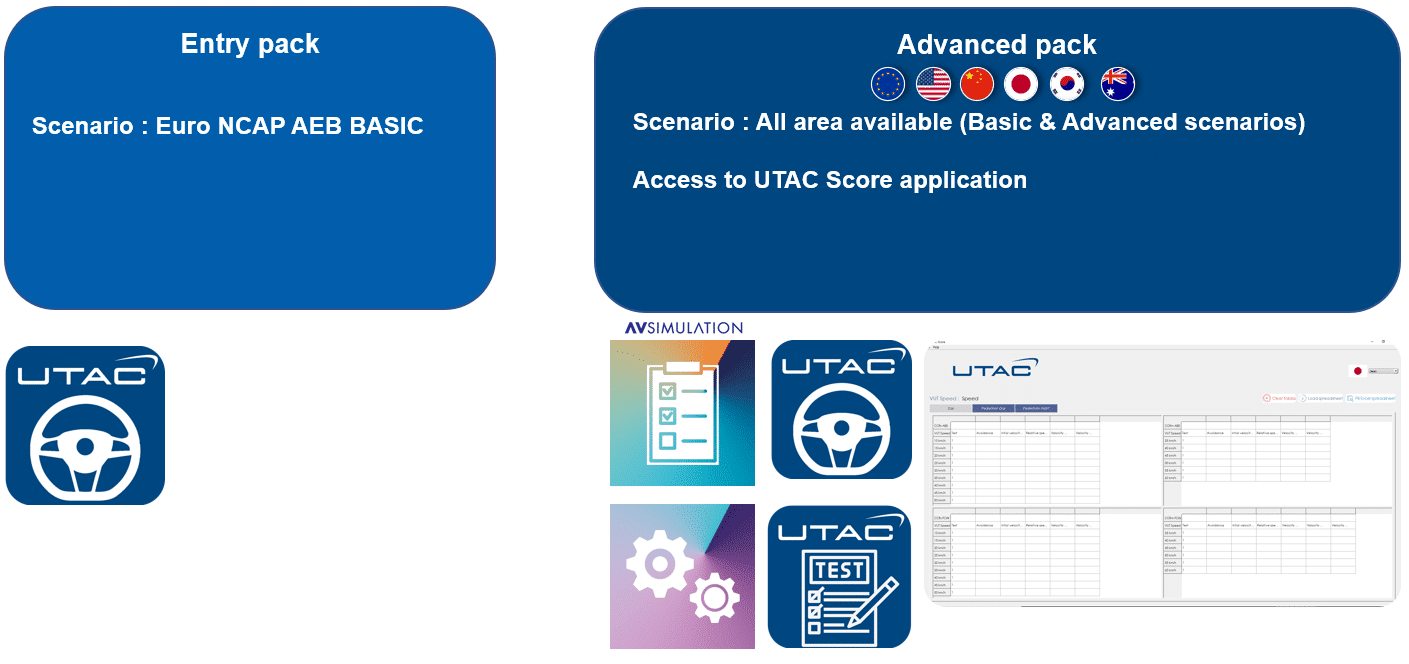
Nouvelle organisation des packs : entrée avancé
Cette année, nous introduisons un nouveau packaging pour les packs NCAP RÉGLEMENTATIONS par rapport aux années précédentes. Désormais, seuls deux packs sont disponibles : le Pack d’Entrée et le Pack Avancé.
Pourquoi avons-nous choisi ce nouveau format ?
Premièrement, le Pack d’Entrée est conçu pour être utilisé avec le Pack AD/ADAS. Il permet aux clients de valider leurs systèmes ADAS AD lors des premières phases de développement et fournit également un aperçu des scénarios de référence.
De plus, avec le nouveau Pack Avancé, vous avez accès à tous les scénarios de toutes les régions suivantes en un seul pack, pour le prix d’un seul pack de zone auparavant : UE, Australie, Japon, Corée, Chine, États-Unis. Cela simplifie la validation entre les différents protocoles sans avoir à installer ou désinstaller les packs.

Quels sont les cas d’utilisation auxquels vous pouvez répondre ?
Le Pack d’Entrée a été conçu pour être utilisé dans les premières phases de développement. Il permet de tester rapidement les systèmes ADAS AD ou les véhicules sur des scénarios simples, avant de les valider sur des cas d’usage plus complexes.
Le Pack Avancé vous permet de réaliser une validation complète et une évaluation de votre système conformément aux protocoles officiels. De plus, il mettra vos systèmes ADAS AD à l’épreuve avec des cas d’usage plus complexes, utilisant des scénarios de haute fidélité qui incluent des trajectoires réelles rencontrées sur piste d’essai. Le Pack Avancé rend possible l’utilisation de SCANeR explore et SCANeR compute, ce qui vous permet de gagner du temps et de réduire les coûts grâce à la simulation massive. Enfin, vous bénéficierez d’une évaluation virtuelle et d’un classement grâce à l’application UTAC Score. Par exemple, vous pourrez générer le tableau de prédiction d’EuroNCAP grâce à la simulation.

Nouvelle fonctionnalité : cibles physicalisées maintenant disponibles dans les packs
Les packs ENTRY et ADVANCED incluent désormais les cibles physicalisées suivantes, compatibles avec les packs « CAPTEURS BASÉS SUR LA PHYSIQUE » :
- NCAP_Cible_Cycliste
- NCAP_Cible_Motorcycliste
- NCAP_Cible_Véhicule_Global
- NCAP_Cible_Piéton_Adulte

RECOMMANDATIONS DE LA PLATEFORME
Matériel
| Minimale (pour anciens systèmes) | Recommandée (pour nouveaux systèmes) | |
| UNITÉ CENTRALE | Intel Gen 6 ou équivalent (Core i7-6800K) | Intel Core i7 12700K / i9 12900K Intel Xeon E/W AMD Ryzen 7 7800X / Ryzen 9 7900X AMD ThreadRipper Pro 5955WX |
| RAM | 16 Go | 32/64 Go |
| Réseau | 1 Gbps | 1 Gbps |
| Stockage (Station de travail ou PC de supervision) | 500 Go | 1TB SSD |
| Carte Graphique(PC Visuel) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| Système d’Exploitation | Windows 10 64bits | Windows 10 64 bits (22H2) |
| Résolutions des Écrans | Full HD (1920×1080) | 4K (3840×2160) |
Logiciels
Système d’Exploitation
Windows 10/11 64 bits
Linux (uniquement pour les modules pris en charge) :
- Ubuntu 20.04 LTS
- Centos 7.9 (décérébré)
- Rocky Linux 8 (compatible avec Red Hat 8) (voir le chapitre sur la migration dans la documentation)
Développement
Visuel C++ 2019 et 2015
Python: 3.9 sur Windows, 3.8 sur Ubuntu, 3.7 sur Centos
Matlab Simulink 2016b et 2019b
Unreal Engine 4.27.2 (uniquement pour la personnalisation avancée ou la production d’actifs)

