

AVSimulation est fier d’annoncer que SCANeR 2023.1, la dernière version majeure de notre logiciel de simulation automobile, est désormais disponible. Elle comprend de nombreuses nouvelles fonctionnalités et améliorations pour répondre aux besoins des applications de simulation les plus complexes pour les ingénieurs et les scientifiques.
Ces nouvelles fonctionnalités aideront à résoudre les défis du développement, des tests et de l’évaluation des fonctions de conduite autonome et avancée grâce à une utilisation intensive de la simulation tout au long du processus de RD.
Les principaux sujets de cette nouvelle version sont le lancement de SCANeR Cloud, notre première plateforme de simulation massive, notre nouvel éditeur de terrain, une nouvelle fonctionnalité pour la génération de terrains paramétriques et les améliorations du moteur UXD pour les révisions de cockpit VR.
Comme toujours, SCANeR 2023.1 est compatible avec les solutions matérielles et logicielles les plus performantes disponibles sur le marché de la simulation.
POINTS FORTS
Parmi les nombreuses améliorations, évolutions et nouvelles fonctionnalités, vous trouverez une sélection de fonctionnalités d’un grand intérêt pour vos cas d’utilisation tels que ADAS, conduite autonome, simulation massive, phares, VR AR, HIL/VIL, intégration et supervision des simulateurs de conduite.
Les principales fonctionnalités de cette nouvelle version sont :
- Notre nouvelle plateforme de simulation massive : SCANeR Cloud
- Nouvel éditeur de terrain avec ergonomie révisée et aperçu du moteur UXD
- Création et génération de terrains paramétriques pour la simulation massive
- Nouvelles fonctionnalités du moteur UXD pour la révision de cockpit dans les applications VR
- De nombreux correctifs pour améliorer les performances et la stabilité
GÉNÉRAL
Introduction
Cette note de version décrit les nouvelles fonctionnalités et évolutions disponibles dans SCANeR 2023.1.
En ce qui concerne la nouvelle structuration de SCANeR, les nouvelles fonctionnalités énumérées dans les paragraphes suivants sont regroupées par Pack :
- Foundation rassemble les fonctionnalités standards de SCANeR pour créer des modèles, intégrer des systèmes, simuler et analyser les résultats
- Packs liés au domaine d’application : AD/ADAS, capteurs basés sur la physique, phares, véhicules dynamique, véhicules spéciaux, facteurs humains
- Packs liés au banc de simulation : cibles en temps réel, simulation massive, simulateurs
- Contenu supplémentaire : NCAP Réglementation, environnements 3D
- Autres applications : éducation, simulation de formation


corrections de bug
Cette version de SCANeR inclut également tous les correctifs et améliorations des versions précédentes, y compris SCANeR 2021.2, 2022.2 et les versions spécifiques aux clients.
SCANeR Cloud
SCANeR Cloud est une plateforme de calcul massive basée sur le web capable d’exécuter des millions de simulations SCANeR en parallèle pour développer ou valider des systèmes de mobilité intelligente.
Contexte
Pour concevoir tous les cas de test ainsi que les simuler, la simulation massive est incontournable. Que ce soit en raison du temps requis ou de la quantité de données générées, la simulation massive est un outil important, voire nécessaire. Le SOTIF (Safety Of The Intended Functionality) exige la génération de milliards de kilomètres pour s’assurer que toutes les situations sont correctement gérées. Au-delà de cette certification, il est également nécessaire de faciliter la production de données où nous devons :
- Obtenir la traçabilité sur les scénarios et les composants du véhicule numérique
- Valider la non-régression d’un composant mis à jour
- Suivre la version de chaque composant et centraliser les résultats
SCANeR Cloud a été conçu en tenant compte de ces cas d’utilisation. Cette plateforme permet de simuler des milliards de kilomètres depuis un simple navigateur. L’utilisateur peut ainsi préparer, exécuter et évaluer ses campagnes de test.
Préparer :
- Configuration de SCANeR
- Un ensemble de scénarios avec leurs dépendances
- Le système à tester (SUT)
- Le modèle de véhicule à tester (VUT)
Exécuter le projet en définissant :
- Le nombre de nœuds de calcul souhaités
- Si un GPU est nécessaire (par exemple, pour la génération d’images ou le calcul des capteurs)
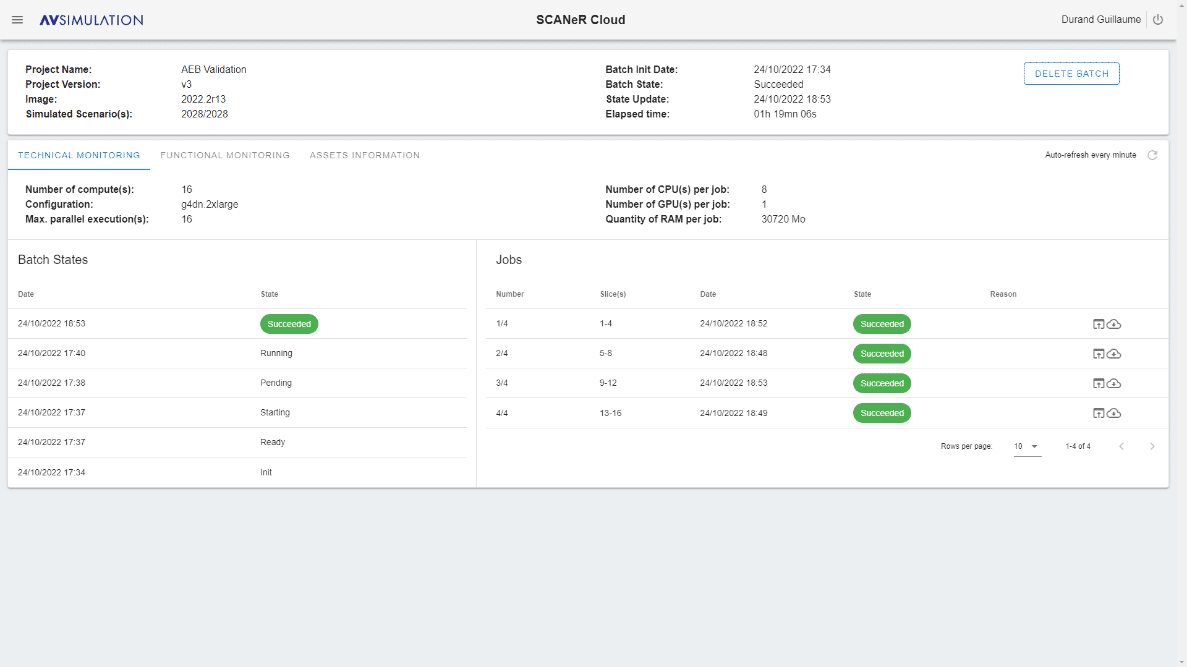
Analyser les résultats dès que l’exécution est lancée :
- En observant le graphique des coordonnées parallèles
- En bleu : les paramètres validant les critères
- En rouge : les paramètres ne validant pas un certain critère
- En observant les détails des scénarios
- En exportant les enregistrements

Il est ainsi possible de détecter si la loi de contrôle répond aux exigences et, dans le cas contraire, de la corriger plus efficacement.
SCANeR Cloud offre une scalabilité permettant d’augmenter le nombre de cas d’utilisation simulés. Il devient possible de couvrir un espace de test très large, de détecter les anomalies plus facilement, de « robustifier » les systèmes plus rapidement et d’approuver les véhicules plus efficacement. Tout cela sans exploser le temps de calcul grâce à la parallélisation permise par la puissance du Cloud. Cette puissance est disponible à la demande, qu’elle soit petite ou grande. Ainsi, SCANeR Cloud offre une flexibilité sans précédent pour l’exécution de campagnes de tests massives.
Avantages
La grande variété de blocs fonctionnels offerts par le cloud Amazon Web Services permet la création d’une grille de calcul efficace. Cela facilite la fourniture d’une plateforme HPC à la demande, équipée des GPU de dernière génération pour exécuter des simulations depuis un navigateur web.
Cette scalabilité facilite l’allocation du nombre de ressources souhaité en fonction des besoins et du budget. Il est alors possible d’utiliser un grand nombre de nœuds de calcul SCANeR pour obtenir des résultats de simulation très rapidement. Cependant, si le besoin n’est pas urgent, il est également possible de commencer avec un déploiement plus petit et de limiter l’utilisation des licences.
Vous souhaitez en savoir plus sur SCANeR Cloud ? Contactez-nous pour plus d’informations ou des démonstrations !
FONDATION
Mode TERRAIN
Nouvelles fonctionnalités
Ergonomie : tout nouveau Terrain SCANeR Studio
Cette version introduit la première version du nouveau Terrain SCANeR, que nous avons commencé à redesign pour améliorer l’efficacité et la convivialité.
Pour cette version, nous avons concentré notre travail sur l’ergonomie et la facilité d’utilisation.
Nous présentons une nouvelle représentation de la barre d’outils SCANeR : le ruban, qui offre une vue plus claire et une meilleure organisation de tous les outils.

Nous avons supprimé certains espaces de travail pour faciliter l’édition de la route et des intersections dans la même vue.
Les paramètres des portions et les décorations sont désormais plus faciles à modifier.

Les couches sont automatiquement mises à jour lorsque vous passez d’un onglet à un autre, vous permettant toujours de voir les informations correctes dans la vue 3D.

Aperçu UXD
Dans cette nouvelle version du terrain, nous avons ajouté la possibilité de voir la version UXD du terrain et ses matériaux avancés en temps réel.
Nous proposons désormais des matériaux avancés pour UXD, permettant la modification directe des propriétés des matériaux. Par exemple, nous avons ajouté l’attrition au matériau de la route pour un réalisme accru.

Dans l’aperçu, l’utilisateur peut modifier l’heure de la journée pour observer l’effet du soleil sur les matériaux.

Terrain Paramétrique
Cette nouvelle fonctionnalité permet à l’utilisateur de créer des terrains simples paramétriques ainsi que de générer des variations avec SCANeR Explore.
Une nouvelle interface utilisateur accessible directement depuis le scénario permet aux utilisateurs de créer des terrains paramétriques.
À chaque point kilométrique, l’utilisateur peut spécifier de nouvelles propriétés pour la route :
- Courbure
- Inclinaison
- Altitude
- Nombre de voies
- Division et fusion
- Marquage
- Signalisation
Ces propriétés sont accessibles dans SCANeR Explore pour créer des paramètres spécifiques au terrain pour le scénario.


Des plans expérimentaux peuvent ensuite être créés, permettant à l’utilisateur de générer un grand nombre de variations de terrain.

Moteur UXD (alimenté par Unreal)
Remarque : Le moteur UXD n’est pas encore capable de couvrir tous les cas d’utilisation de SCANeR. Par conséquent, le module VISUAL original, basé sur Open Scene Graph, est toujours disponible.
Nouvelles fonctionnalités
Éditeur de Cockpit
Nous avons ajouté de nouvelles fonctions pour la révision du cockpit dans les applications VR.
/!\ Ces fonctionnalités nécessitent un travail préparatoire sur le 3D du véhicule dans Unreal Editor et sont uniquement disponibles avec les fichiers xcpt.

Il est désormais possible de définir l’orientation, l’inclinaison et le roulis pour chaque miroir en temps réel, directement depuis l’interface utilisateur du cockpit ou via un joystick.

Les utilisateurs peuvent activer ou désactiver les pictogrammes des angles morts directement depuis l’interface utilisateur de l’éditeur de cockpit ou via les fonctions MICE.
Il est désormais possible de diffuser des vidéos externes (par exemple, VLC) ou internes (CameraSensor) dans le cockpit.
Pour cela, nous utilisons le protocole NDI et des outils pour détecter et diffuser toutes les vidéos sur le réseau.


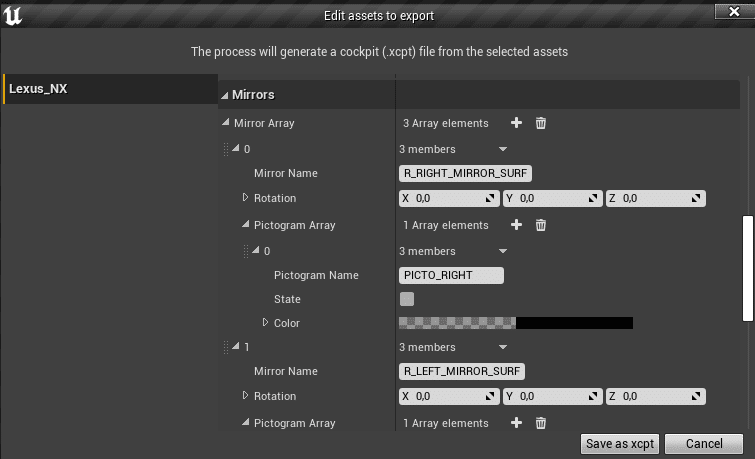
Exportateur de Cockpit
Pour faciliter la création de fichiers xcpt pour les cockpits depuis Unreal Editor, nous avons développé un nouvel outil appelé Exportateur de Cockpit.
Cet outil est automatiquement installé avec UXD Template AddOn et est accessible en cliquant avec le bouton droit sur le blueprint du véhicule.
Les nouvelles fonctions de cockpit fonctionnent avec un système de Tags. Il permet à l’utilisateur de vérifier tous les paramètres avant d’exporter le fichier xcpt. Tous les tags sont automatiquement détectés sur le véhicule et générés dans cette nouvelle interface utilisateur.
Il génère ensuite automatiquement le fichier XML xcpt SCANeR avec tous les tags et informations nécessaires pour le nouvel éditeur de cockpit.
Améliorations
Optimisation UXD
Dans cette version, nous avons travaillé sur des optimisations pour augmenter les performances de UXD. Le résultat est un taux de trame jusqu’à x2 dans les meilleurs cas.

Storyboard
Nouvelle fonctionnalité : Tâche de Fond
Un nouveau type d’objet a été ajouté au storyboard : la tâche de fond.

Figure 3: Tâche d’arrière-plan dans un nouveau Storyboard
Une tâche de fond a les mêmes propriétés qu’une étape (scripts, entrées/sorties et transitions) mais est toujours exécutée. Elle permet d’exécuter des calculs génériques qui ne sont pas spécifiques à une étape particulière.
Il ne peut y avoir qu’une seule tâche de fond par storyboard, et elle est automatiquement créée avec un nouveau scénario.
Les tâches de fond ont deux transitions spécifiques :
- Fin du Scénario : la simulation s’arrête lorsque l’une des conditions est remplie.
- Échec du Scénario : la simulation s’arrête lorsque l’une des conditions est remplie, et la simulation est considérée comme un échec.
Améliorations
Manipulation des Étapes et des Conditions
La manipulation des Étapes et des Conditions est désormais facilitée avec les améliorations suivantes.
Une fonctionnalité de copier/coller a été ajoutée pour les Conditions et les Étapes. Elles peuvent être copiées et collées dans le même scénario ou dans un scénario différent.

Figure 4 Copier/coller d’une étape
Vous pouvez également stocker une Condition ou une Étape en tant que fichier, avec la fonction « Ajouter à la bibliothèque ».

Figure 5 Stocker une condition dans la bibliothèque
Ces Conditions (ou Étapes) stockées dans la bibliothèque peuvent être réutilisées dans d’autres scénarios avec « Copier depuis la bibliothèque » (le contenu du fichier est copié dans le scénario, et non référencé).

Figure 6 Créer une nouvelle étape à partir de la bibliothèque
Explorer les Paramètres
Les variables dans une Condition peuvent désormais être définies comme un Paramètre Explore, par exemple, la durée du délai pour une Condition de type TimeOut.

DYNAMIQUE DES VÉHICULES
Interface CALLAS
Nouvelle fonctionnalité :
Schéma de Répartition
Dans les véhicules CALLAS, le schéma de répartition pour la définition du groupe motopropulseur, incluant les différentiels, le moteur et/ou les machines électriques, a été entièrement redesigné. Il offre une interface claire permettant de définir les moteurs ou les différentiels de la transmission du véhicule.
Cette interface permet également aux utilisateurs de mettre à jour le schéma pour des architectures de groupe motopropulseur exotiques telles que les types de transmission en « H » ou en « I ».

Nouveau Composant Graphique
Dans les interfaces Callas avec des données telles que courbes, tableaux de courbes ou cartes, un nouveau composant graphique montre à l’utilisateur une représentation 2D des données directement dans l’interface.

Améliorations
En plus de l’interface de répartition et du nouveau composant graphique, toutes les interfaces utilisateur de l’éditeur de véhicules Callas ont été entièrement modernisées pour être cohérentes avec le reste de SCANeR Studio.

SCANER POWER’BY
Ces fonctionnalités nécessitent un abonnement valide à 3DExperience.
Nouvelles fonctionnalités
Sur SCANeR Explore, les utilisateurs peuvent désormais exécuter leurs plans de test localement, et tous les résultats seront directement téléchargés sur la plateforme 3DEXPERIENCE. Cela permet une traçabilité complète des résultats des plans de test, qui peuvent maintenant être communiqués et partagés entre les équipes.
Les simulations et les plans de test SCANeR peuvent également être exécutés directement sur le Cloud de Dassault Systèmes avec l’outil Simulation Manager.

Amélioration
Des améliorations ont été apportées à SCANeR Power’By pour la gestion de la configuration.
De nouvelles entrées ont été ajoutées au menu 3DEXPERIENCE pour faciliter la gestion de la configuration et l’utilisation de 3DEXPERIENCE.

NCAP REGULATIONS

Mise à jour 2023 des protocoles officiels
Euro NCAP a récemment publié les protocoles officiels pour les prochains tests AEB et LSS à partir de janvier 2023. Nous avons mis à jour les packs Euro et Australiens conformément à la nouvelle publication. L’ANCAP australien est basé sur les protocoles Euro NCAP.
Pack NCAP Régulations pour l’UE – Mise à jour du protocole ALKS
En collaboration avec notre partenaire UTAC, nous sommes très fiers de publier un pack mis à jour dédié aux Réglementations Européennes et NCAP.
Les principales mises à jour concernent les nouveaux scénarios ALKS conformément à la série UN R157 01, qui est un amendement à la série 00 adopté en 2023. Il introduit une extension de la plage de vitesses et la possibilité d’effectuer des manœuvres de changement de voie. La plage de vitesses est désormais de 0-130 km/h, contre 0-60 km/h auparavant, et nos scénarios ALKS prennent en compte cette haute vitesse. Grâce aux nombreux paramètres, vous pouvez effectuer des simulations pour évaluer votre système de manœuvre automatique de changement de voie.
Nouveau jeu de “Scénarios de Base” disponible dans tous les packs
Nous avons ajouté de nouveaux scénarios appelés « scénarios de base », qui sont basés sur les mêmes protocoles mais avec une implémentation plus simple et théorique. Un terrain d’essai générique est utilisé et les trajectoires pour le véhicule cible et le véhicule ego sont idéales ; aucun bruit n’est présent sur la vitesse ou les coordonnées cartésiennes. L’avantage d’utiliser ce type de scénario est de pouvoir commencer le développement d’un système ADAS dans des conditions plus simples (moins de variables).
Les “scénarios avancés” offrent un niveau de réalisme plus élevé nécessaire pour la validation et l’homologation. Cependant, durant le développement, il peut être plus facile de commencer par utiliser un environnement moins détaillé. Pouvoir utiliser les deux niveaux permet à l’utilisateur de comparer les deux situations et d’analyser les résultats pour gagner en efficacité. De cette manière, les problèmes dans le système ADAS peuvent être identifiés plus rapidement.
RECOMMANDATIONS DE LA PLATEFORME
Matériel
| Minimale (pour anciens systèmes) | Recommandée (pour nouveaux systèmes) | |
| UNITÉ CENTRALE | Intel Gen 6 ou équivalent (Core i7-6800K) | Intel Core i7 13700K / i9 13900K Intel Xeon E/W AMD Ryzen 7 7700X / Ryzen 9 7900X AMD ThreadRipper Pro 5955WX |
| RAM | 16 Go | 64 Go |
| Réseau | 1 Gbps | 1 Gbps |
| Stockage (Station de travail ou PC de supervision) | 500 Go | 500 Go SSD To ou plus (pour superviseur) |
| Carte Graphique(PC Visuel) | Quadro P5000 GeForce GTX 1080 | NVIDIA Haut de Gamme – Quadro RTX A5000 / RTX A6000 – Quadro RTX 6000 (ADA) – GeForce RTX 4080 / RTX 4090 |
| Système d’Exploitation | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Résolutions des Écrans | Full HD (1920×1080) | 4K (3840×2160) |
Logiciels
Système d’Exploitation
Windows 10 64 bits
Linux (uniquement pour les modules pris en charge) :
- Ubuntu 20.04 LTS
- Centos 7.9
Développement
Visual C++ 2019 et 2015
Python: 3.9 sur Windows, 3.8 sur Ubuntu, 3.7 sur CentOS
MATLAB Simulink 2016b et 2019b
Unreal Engine 4.27.2 (uniquement pour la personnalisation avancée ou la production d’actifs)


