

AVSimulation est fier d’annoncer que SCANeR 2022.1, la dernière version majeure de notre logiciel de simulation automobile, est désormais disponible. Cette version inclut de nombreuses nouvelles fonctionnalités et améliorations pour répondre aux besoins des applications de simulation les plus exigeantes pour les ingénieurs et les scientifiques.
Ces nouvelles fonctionnalités aideront à relever les défis liés au développement, à l’essai et à l’évaluation des fonctions de conduite autonome grâce à des simulations massives, un domaine d’une importance capitale pour la plupart de nos clients.
Les principaux sujets incluent des améliorations de la première version officielle de notre nouveau moteur de rendu UXD, l’intégration avec la plateforme Dassault 3DEXPERIENCE, un nouveau pack pour la modélisation de véhicules spéciaux, ainsi que des packs NCAP mis à jour couvrant davantage de protocoles.
Comme toujours, SCANeR 2022.1 est compatible avec les solutions matérielles et logicielles les plus performantes disponibles sur le marché de la simulation.
POINTS FORTS
Parmi les nombreuses améliorations, évolutions et nouvelles fonctionnalités, vous trouverez ci-dessous une sélection des fonctionnalités les plus intéressantes pour vos cas d’utilisation tels que l’ADAS, la conduite autonome, la simulation massive, les phares, la VR AR, l’intégration et la supervision du simulateur de conduite.
Les principales fonctionnalités de cette nouvelle version sont :
- Le moteur UXD est désormais officiel pour les simulateurs et les capteurs de caméra,
- SCANeR est désormais interfacé avec la plateforme DASSAULT 3DEXPERIENCE,
- Pack de véhicules spéciaux,
- Pack de scénarios Japan NCAP,
GÉNÉRAL
Introduction
Cette note de version décrit les nouvelles fonctionnalités et évolutions disponibles dans SCANeR 2022.1.
En ce qui concerne la nouvelle structuration de SCANeR, les nouvelles fonctionnalités énumérées dans les paragraphes suivants sont regroupées par Pack :
- Foundation rassemble les fonctionnalités standards de SCANeR pour créer des modèles, intégrer des systèmes, simuler et analyser les résultats
- Packs liés au domaine d’application : AD/ADAS, capteurs basés sur la physique, phares, véhicules dynamique, véhicules spéciaux, facteurs humains
- Packs liés au banc de simulation : cibles en temps réel, simulation massive, simulateurs
- Contenu supplémentaire : NCAP Réglementation, environnements 3D
- Autres applications : éducation, simulation de formation


corrections de bug
Cette version de SCANeR inclut également toutes les corrections de bugs et améliorations des versions précédentes, y compris SCANeR 1.9, 2021.2, ainsi que les versions spécifiques aux clients.
FONDATION
Moteur UXD (alimenté par Unreal)
Notre nouveau moteur de rendu 3D est désormais appelé « UXD engine » et est officiellement intégré dans SCANeR. Tous les modules et la documentation ont été mis à jour pour mentionner UXD.
Le module Urenderer est maintenant appelé UXDRender et SCANeR_UEngine est désormais nommé UXDEngine.
Note : Le moteur UXD n’est pas encore capable de prendre en charge tous les cas d’utilisation de SCANeR. Par conséquent, le module VISUAL original, basé sur Open Scene Graph, reste disponible.
Nouvelles fonctionnalités
Segmentation sémantique
Pour les applications d’apprentissage profond, SCANeR peut être utilisé pour générer des images segmentées.
Les images sont générées en couleurs fausses, chaque couleur de pixel correspondant à une classe ou une instance d’objet.
Les classes et les couleurs peuvent être spécifiées dans un fichier de configuration.


Intégration des fichiers IES pour la simulation de lumière par défaut
Des fichiers IES réalistes sont désormais utilisés pour les phares des véhicules. Pour l’instant, ces fichiers ne sont pas configurables.


Support des capteurs de caméra et des fonctions visuelles
Une nouvelle interface graphique est disponible pour la configuration du post-traitement des caméras.
Toutes les fonctionnalités du moteur UXD peuvent également être utilisées pour produire des images de capteurs de caméra.
Comme précédemment dans SCANeR, les images peuvent être partagées et traitées en temps réel grâce à l’API de partage d’images SCANeR.
La fonction Snapshot fonctionne désormais avec le canal caméra et visuel UXDRender.



Caméra standard

360°

Fish-Eye
Panneau de signalisation dynamique
Les panneaux de messages dynamiques de trafic sont désormais pris en charge par UXDRender. Ils peuvent afficher du texte simple et des images pour fournir des informations visuelles.

Amélioration
Des améliorations générales, une stabilisation et une optimisation ont été réalisées sur le module UXDRender.
Utilisation du simulateur
Le module de rendu est désormais compatible avec l’utilisation du simulateur.
La déformation dynamique est prise en charge grâce à des plugins externes développés par les fournisseurs de technologie :
- Affichage évolutif
- Vioso
- Projection dome
Nous supportons également les systèmes de suivi basés sur Unreal LiveLink. Ils peuvent être utilisés avec le module de suivi de tête SCANeR ou connectés directement au système de suivi.


Ressources 3D
De nouveaux éléments 3D, tels que des arbres compatibles à la fois avec le moteur OSG et le moteur UXD, sont disponibles.


De nouveaux éléments piétons de haute qualité ont été ajoutés :
5 nouveaux enfants + 21 nouveaux adultes

Controlpad
Nous avons ajouté de nouvelles fonctionnalités et améliorations au module ControlPad pour aider l’utilisateur à manipuler les graphiques pendant la simulation.
Nouvelles fonctionnalités
Les fonctionnalités suivantes ont été ajoutées au widget graphique :
- Création d’un graphique X/Y
- Possibilité de mettre en surbrillance un signal dans le graphique
- Ajout d’une deuxième ordonnée au graphique


Une barre de recherche a été ajoutée pour aider à trouver le signal à afficher.

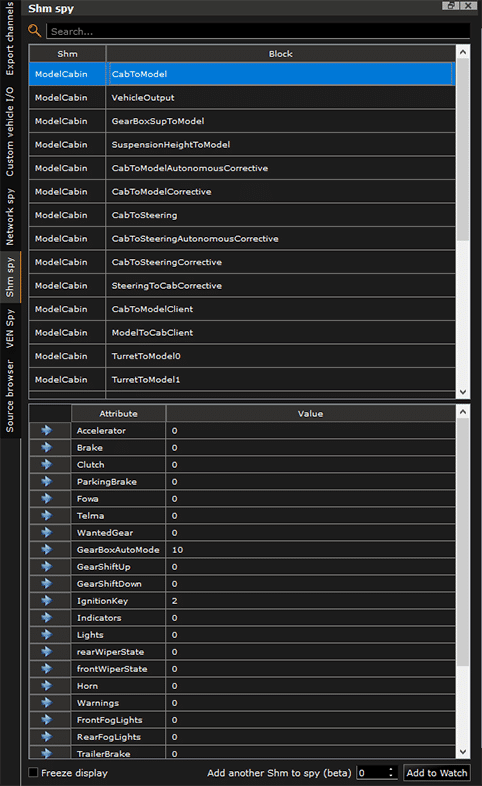
Un nouvel onglet « Shm spy » a été ajouté pour afficher les signaux à partir de la mémoire partagée :
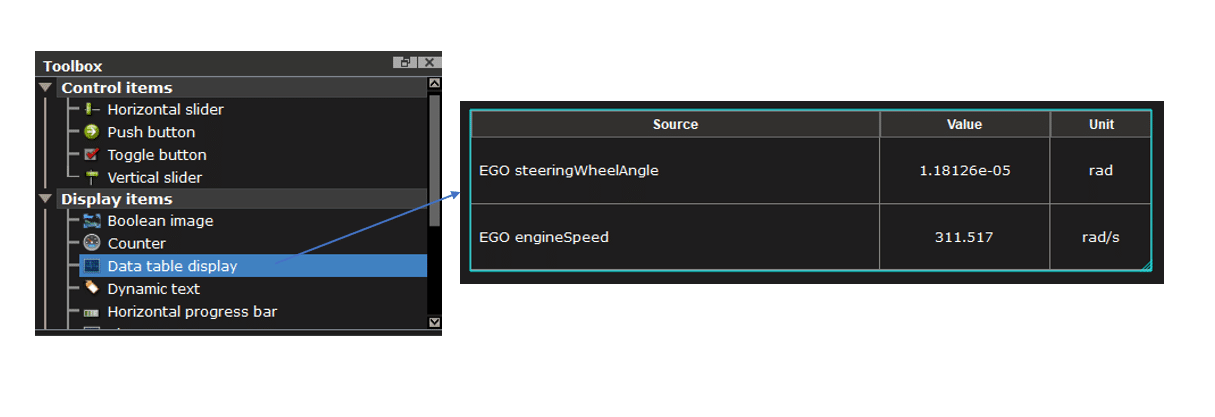
Un nouvel affichage en tableau de données a été ajouté pour faciliter l’affichage de plusieurs signaux.
Améliorations
La manipulation des graphiques dans ControlPad a été améliorée avec les fonctionnalités suivantes :
- Déplacement dans le graphique en maintenant le clic gauche
- Zoom sur l’axe Y avec la molette de la souris
- Zoom sur le deuxième axe Y avec Ctrl + molette de la souris
- Ajout de marqueurs avec le clic droit

STUDIO GUI
Nouvelle fonctionnalité : Importer un scénario
Vous pouvez désormais importer un scénario (au format .zip) dans votre configuration. En combinaison avec la fonction d’exportation de scénario, il est maintenant plus facile de partager des scénarios entre différents utilisateurs de SCANeR ou différentes configurations.

SupportFMI
Plusieurs améliorations ont été apportées pour le support de la norme FMI :
- La cartographie FMU prend désormais en charge le protocole SHM de SCANeR
- Support de la variabilité discrète FMI
- Nouveaux échantillons FMU : CruiseControl, LaneKeeping, SpeedLimitor.
- Les FMU sont inclus dans l’exportation de scénario

Cibles en temps réel
API CALLAS avec les cibles NI Veristand RT
Pour les cibles en temps réel National Instruments, il est désormais possible de connecter des modèles externes au modèle de véhicule CALLAS RT via Matlab Simulink.
L’utilisateur n’a qu’à compiler son modèle avec le fichier de compilation dédié NI fourni.
Support du protocole de communication EtherCAT
Dans le cadre du projet de simulateur ROADS, le protocole de communication a été ajouté et est maintenant supporté dans SCANeR. Sur le simulateur ROADS, il est utilisé (au lieu de la connexion UDP habituelle) pour connecter le module ACQUISITION au ordinateur en temps réel “Beckhoff”.

Vehicle in the Loop
SCANeR 2022.1 est prêt pour les applications VIL (Vehicle In the Loop) :
- Compatibilité totale avec l’instrumentation des véhicules et les systèmes de positionnement
- Outils et méthodes pour créer des scénarios et calibrer les systèmes Réel et Virtuel
- Interfaces avec les ECU ADAS
- Outils d’affichage et de surveillance


Véhicules spéciaux
Introduction
Un nouveau pack est disponible dans SCANeR : le pack Véhicules Spéciaux.
Ce pack ajoute des fonctionnalités supplémentaires au pack Dynamic Vehicle pour les applications hors route et hors autoroute :
- Les véhicules peuvent être équipés d’une ou plusieurs tourelles (avec ou sans armes)
- Les véhicules peuvent être équipés de chenilles (pour les véhicules militaires ou hors route, par exemple pour les terrains enneigés)
- Véhicules tout-terrain.
De plus, un modèle de sol meuble très avancé a été ajouté : Terramechanics.
Des exemples de modèles sont disponibles dans un programme d’installation complémentaire dédié.
Véhicules avec tourelles
Les tourelles sont désormais prises en charge grâce au pack Véhicules Spéciaux, permettant à l’utilisateur de définir une ou plusieurs tourelles et armes.
Un modèle de véhicule est fourni pour démontrer cette fonctionnalité.

Véhicules avec chenilles
Les véhicules à chenilles peuvent également être simulés au sein des véhicules CALLAS, couvrant aussi bien les applications civiles que militaires.
Un modèle de véhicule est fourni pour mettre en avant ces nouvelles fonctionnalités dans le véhicule CALLAS.

Terramechanics
Dédié aux véhicules tout-terrain, le modèle Terramechanics vise à modéliser le comportement des sols meubles et l’interaction entre les pneus et le sol. Il est basé sur la théorie de Bekker et peut être configuré à l’aide des paramètres fournis pour différents types de sols.
NCAP Regulations


Pack Japon NCAP
En collaboration avec notre partenaire UTAC, nous sommes très fiers de publier ce nouveau pack dédié aux protocoles Japan NCAP.
Le pack couvre les 109 scénarios modèles suivants (107 AEB 2 LSS) :
| De voiture à voiture : CCRs AEB/FCW CCRm AEB/FCW CCRm AEB/FCW | Évaluation partielle : CPN25 AEB/FCW CPN50_8kmh AEB/FCW CPN50_Child AEB/FCW CPN75 AEB/FCW CPNO50_Child AEB/FCW NIGHT_WithoutSL_CPF25 AEB/FCW NIGHT_WithoutSL_CPF50_8kmh AEB/FCW NIGHT_WithoutSL_CPF75 AEB/FCW NIGHT_WithtSL_CPF25 AEB/FCW NIGHT_WithSL_CPF50_8kmh AEB/FCW NIGHT_WithSL_CPF75 AEB/FCW |
| De voiture à piéton: CPN50 AEB/FCW CPNO50 AEB/FCW (NOUVEAU!) NUIT_SansSL_CPF50 AEB/FCW NUIT_AvectSL_CPFO50 AEB/FCW (NOUVEAU!) NUIT_AvecSL_CPF50 AEB/FCW NIGHT_AvecSL_CPFO50 AEB/FCW (NOUVEAU!) |

NIGHT_AvecSL_CPFO50 AEB/FCW
Pour le scénario de nuit avec éclairage environnant, l’illumination a été configurée et calibrée pour répondre aux conditions du protocole :
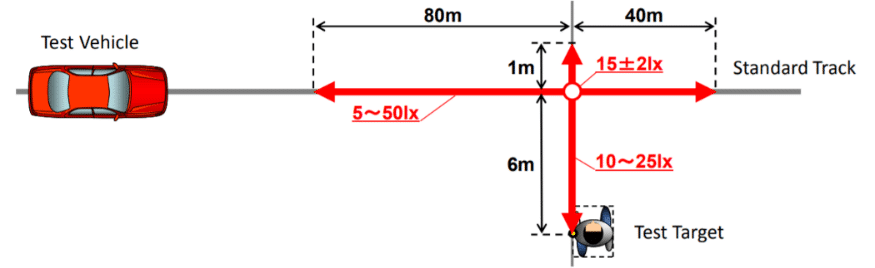

Conditions d’éclairage et vérification réalisées avec un capteur de lumière virtuel
Système de support de voie (LSS) :
- LSS_LKA_DL_RIGHT_0_3
- LSS_LKA_SL_LEFT_0_3

LSS_LKA_SL_LEFT_0_3
Le module UTAC Score a été mis à jour pour inclure l’évaluation des scénarios japonais.

À venir début Q1 2022 :
Nouveau 3D pour le véhicule obstacle dans le pack Japon :

Pack Coréen :
Le pack NCAP coréen évalue les systèmes AEB, LKA et FCW.
Pour AEB et FCW, 48 scénarios sont disponibles pour évaluer la performance du système. Les trois cibles NCAP sont : Cycliste, Piéton et Véhicule.
Pour LSS, 26 scénarios sont inclus dans le pack avec 2 scénarios inédits.
Pack Australien :
Le pack NCAP australien contient les mêmes scénarios que le protocole européen. Cependant, tous les scénarios ont été adaptés à l’application pour conduite à droite.
| Scénarios de voiture à voiture : Voiture à voiture arrière stationnaire AEB et FCW Voiture à voiture arrière en mouvement AEB et FCW Voiture à voiture arrière freinant 02G, 06G AEB et FCW Voiture à voiture avant traversée de la route. | Scénarios de passage d’une voiture à un piéton : De voiture à piéton côté gauche Adulte De voiture à piéton côté droit Adulte De voiture à piéton côté droit Enfant De voiture à piéton longitudinal Adulte De voiture à piéton en virage Adulte De voiture à piéton en marche arrière Adulte | Scénarios de passage d’une voiture à une bicyclette : Voiture à bicyclette côté proche Adulte Voiture à bicyclette côté proche Adulte Obstrué Voiture à bicyclette côté éloigné Adulte Voiture à bicyclette longitudinal Adulte | Scénarios LSS : Essais en bord de route (ELK) Essais en ligne continue (ELK) Véhicule venant en sens inverse (ELK) Véhicule dépassant (ELK) Essais en ligne pointillée (LKA) Essais en ligne continue (LKA) |
Nouveau modèle 3D PTW

SCANER POWER’BY

SCANeR Power’By est l’intégration de SCANeR dans la plateforme 3DEXPERIENCE pour offrir à nos clients la continuité numérique dont ils ont besoin pour leurs projets.
Ces fonctionnalités sont uniquement disponibles pour les clients de Dassault Systèmes.
Un utilisateur disposant d’une licence fournie par Dassault Systèmes, d’un compte 3DEXPERIENCE et du connecteur pour SCANeR pourra lancer SCANeR directement depuis la plateforme.
SCANeR Power’By permet de sauvegarder et d’ouvrir des simulations depuis et vers la plateforme.
Une simulation est représentée par un scénario et tout ce dont SCANeR a besoin pour l’exécuter sur n’importe quel ordinateur ou dans le cloud (configuration et données).
Un nouveau menu est disponible pour 3DEXPERIENCE dans SCANeR Studio et SCANeR Explore. En effet, l’utilisateur peut également créer des plans de test et les sauvegarder sur la plateforme.

Tous les résultats de simulation peuvent être visualisés directement sur la plateforme avec les outils Dassault Systèmes.

SIMULATION MASSIVE
SCANeR compute
Support Docker
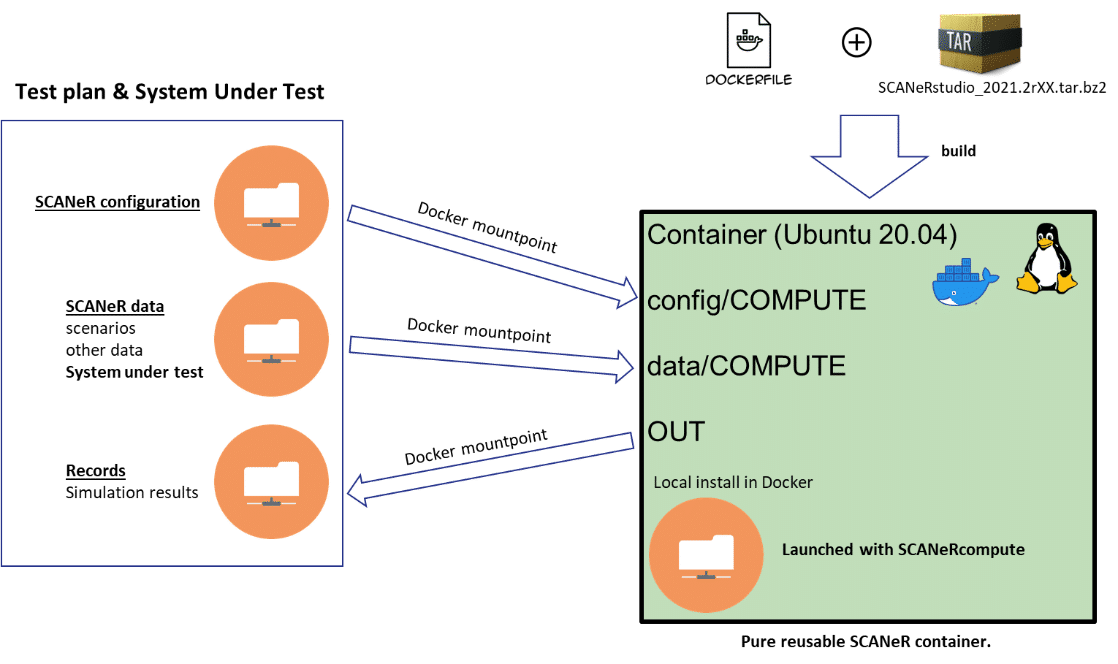
Pour faciliter le déploiement en cloud, SCANeR propose désormais un modèle Docker qui peut être utilisé pour générer des images Docker à partir de la version actuelle de SCANeR, et est entièrement réutilisable et indépendant du système testé.
En utilisant les points de montage Docker, la configuration et les données peuvent être injectées au moment de l’exécution.
RECOMMANDATIONS DE LA PLATEFORME
Matériel
| Minimale (pour anciens systèmes) | Recommandée (pour nouveaux systèmes) | |
| UNITÉ CENTRALE | Intel Gen 6 ou équivalent (Core i7-6800K) | Intel Core i7 11700K / i9 11900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3960X |
| RAM | 16 Go | 32/64 Go |
| Réseau | 1 Gbps | 1 Gbps |
| HDD(PC supérieur) | 500 Go | 500 Go SSD To ou plus (pour superviseur) |
| Carte graphique (PC visuel) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| Système d’Exploitation | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Résolutions des Écrans | Full HD (1920×1080) | 4K (3840×2160) |
Logiciels
Système d’Exploitation
Windows 10 64 bits
Linux (uniquement pour les modules pris en charge) :
- Ubuntu 20.04 LTS
- Centos 7.9
Développement
Visual C++ 2019 et 2015
Python: 3.9 sur Windows, 3.8 sur Ubuntu, 3.7 sur Centos
Matlab Simulink 2016b et 2019b
Unreal Engine 4.27.2 (uniquement pour la personnalisation avancée ou la production d’actifs)

