

AVSimulation est fier d’annoncer que SCANeR 2021.2, la dernière version de notre logiciel de simulation automobile, est désormais disponible. Elle remplace la version 2021.1 et inclut de nombreuses corrections et améliorations pour répondre aux besoins des applications de simulation les plus exigeantes pour les ingénieurs et les scientifiques.
Ces nouvelles fonctionnalités aideront à résoudre les défis liés au développement, à la validation et à l’évaluation des fonctions de conduite autonome grâce à une simulation massive, un domaine de la plus haute importance pour la plupart de nos clients.
Les principaux sujets sont les améliorations du nouveau moteur de rendu basé sur la physique, utilisant le moteur Unreal, les nouvelles fonctionnalités de simulation des phares et un meilleur support des plateformes en temps réel.
Comme toujours, SCANeR 2021.2 est compatible avec les solutions matérielles et logicielles les plus performantes disponibles sur le marché de la simulation.
POINTS FORTS
Parmi les nombreuses améliorations, évolutions et nouvelles fonctionnalités, vous trouverez ci-dessous une sélection de caractéristiques particulièrement intéressantes pour vos cas d’utilisation, tels que les ADAS, la conduite autonome, la simulation massive, les phares, la réalité virtuelle (VR) et augmentée (AR), ainsi que l’intégration et la supervision des simulateurs de conduite.
Les principales fonctionnalités de cette nouvelle version sont :
- URenderer prend désormais en charge les écrans multiples et la distorsion.
- Nouveau storyboard de scénario
- Préréglages et rapports des phares
- Cartographie des tons des phares
- Exportation Matlab depuis DataConvertor
- Enregistrement audio pour analyse
- Interface dSpace + CallasRT
- Packs de scénarios NCAP pour les États-Unis et la Chine
GÉNÉRAL
Introduction
Cette note de version décrit les nouvelles fonctionnalités et évolutions disponibles dans SCANeR 2021.2. En ce qui concerne le nouvel emballage de SCANeR, les nouvelles fonctionnalités énumérées dans les paragraphes suivants sont regroupées par Pack :
- Foundation rassemble les fonctionnalités standards de SCANeR pour créer des modèles, intégrer des systèmes, simuler et analyser les résultats
- Packs liés au domaine d’application : AD/ADAS, capteurs basés sur la physique, phares, dynamique du véhicule, militaire, facteurs humains
- Packs liés au banc de simulation : cibles en temps réel, simulation massive, simulateurs
- Contenu supplémentaire : NCAP Réglementation, environnements 3D
- Autres applications : éducation, simulation de formation

corrections de bug
Cette version de SCANeR Studio inclut également toutes les corrections de bogues et améliorations des versions précédentes, y compris SCANeR Studio 2021.1, 1.9, et les versions spécifiques aux clients.
FONDATION
Moteur de rendu 3D (Unreal) – (VERSION BETA)
Amélioration
Des améliorations générales, une stabilisation et une optimisation ont été apportées au module URenderer. Les performances pour le chargement des ressources et le taux de trame de simulation ont été améliorées.
Un nouveau chapitre de la documentation est consacré à l’utilisation de SCANeR en combinaison avec Unreal Engine. Ce chapitre contient toutes les informations nécessaires sur l’utilisation du Template pour Unreal Engine et sur la manière de préparer les niveaux et les ressources pour SCANeR. L’installation du Template Unreal Engine se fait désormais directement via l’installateur d’Unreal AddOn.
Rendu
Le module de rendu est désormais compatible avec la distorsion statique et le mélange. SCANeR Studio prend en charge les fournisseurs externes suivants :
- Affichage évolutif
- Vioso
- Projection dome
Il prend également en charge la configuration NDisplay à partir de `Observer.cfg` pour configurer plusieurs clusters pour l’utilisation des simulateurs.
Note: Bien que cette fonctionnalité ne soit pas encore entièrement comparable au module VISUAL existant, elle reste en version Beta jusqu’à la prochaine version. Toutefois, elle a été largement améliorée et complétée et est désormais très proche d’être utilisable sur un simulateur de conduite ou pour des applications ADAS. Nous attendons avec impatience vos retours sur les aspects à améliorer.


Terrain
Améliorations de l’importation OpenDrive
Les attributs de tunnel et de pont sont désormais pris en charge pour l’importation OpenDrive, et les décorations de profil sont générées de manière procédurale.
Nous avons également ajouté une nouvelle option pour ignorer les objets n’ayant pas de représentation graphique (.ive file).

Une documentation de bonnes pratiques expliquant l’importation OpenDrive avec SCANeR sera publiée prochainement et est disponible sur demande.

Les tunnels et ponts sont automatiquement créés à partir d’un import OpenDrive.
Trafic et Scénario
Storyboard
En plus du système existant, nous avons ajouté une nouvelle façon de décrire un scénario pour orchestrer la simulation. Il est composé de :
- Un ou plusieurs étapes, chacune représentant une séquence spécifique du scénario. Une seule étape est exécutée à la fois.
- Transitions de succès, elles sont utilisées pour passer à l’étape suivante. Si la transition est exécutée depuis la dernière étape, la simulation s’arrête et son exécution est marquée comme réussie.
- Transitions d’échec, elles sont utilisées pour arrêter l’exécution de la simulation et la marquer comme échouée.
Pour commencer, nous fournissons un scénario d’exemple: Cut_in_Cut_out.sce

Mode d’analyse
DATACONVERTOR

Une nouvelle option d’exportation est disponible dans DATACONVERTOR, permettant aux utilisateurs de choisir le format MATLAB (.mat) pour exporter les signaux enregistrés pendant une simulation.
Cette nouvelle option d’exportation permet aux utilisateurs d’accéder aux messages SCANeR bruts ou aux signaux interpolés, pour effectuer des post-traitements dans MATLAB. Le format MATLAB a l’avantage de conserver la structuration des messages, facilitant ainsi le post-traitement.
Post-traitement dans MATLAB
Enregistrement/Relecture du son
Le son configuré et joué pendant la simulation par le scénario peut désormais être enregistré et rejoué dans l’outil d’analyse. L’enregistrement est activé dans la configuration du module Son. La piste audio de la simulation sera enregistrée dans un fichier unique au format ogg, compatible avec l’outil d’analyse. Le module Son prend également désormais en charge plusieurs cartes son (le son de la simulation peut être joué simultanément sur plusieurs cartes son/sorties).
CAPTEURS BASÉS SUR LA PHYSIQUE
Radar L2
Le modèle de capteur Radar L2 a été optimisé pour atteindre des fréquences plus élevées en conditions réelles, permettant à l’utilisateur de sélectionner les sorties en fonction de ses besoins.
Note : Pour que le capteur physique fonctionne correctement, les pilotes nVidia ne doivent pas être mis à jour vers les versions les plus récentes. Il est conseillé aux utilisateurs d’utiliser les pilotes Nvidia version 446.14 ou antérieure.
POINTS FORTS
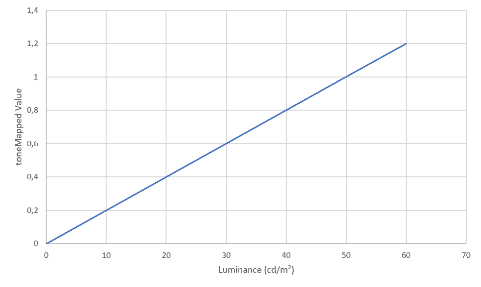
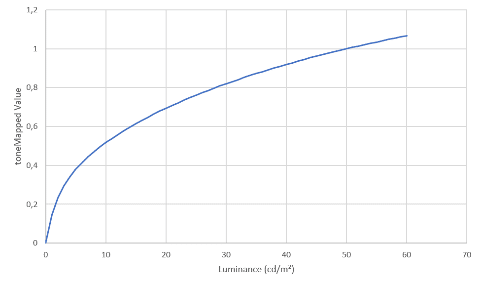
Phares : Nouveaux opérateurs de cartographie des tons
En plus de l’opérateur de cartographie des tons linéaire par défaut, d’autres opérateurs sont désormais proposés à l’utilisateur :
- Logarithmique
- Munsell,
- Opérateur personnalisé, permettant à l’utilisateur de définir lui-même la formule de l’opérateur.
| Linéaire | Logarithmique | Munsell |
 |  |

Préréglages
Le module NightTestManager intègre une nouvelle fonctionnalité permettant de sauvegarder et de restaurer rapidement vos options d’outils préférées.
Un préréglage est une combinaison de l’état de presque tous les outils interactifs dans l’interface utilisateur de NIGHTTESTMANAGER. Par exemple, en sélectionnant un préréglage, les utilisateurs peuvent activer les courbes d’isolux, afficher les murs de visée et changer de vue en une seule action.
Les préréglages peuvent être sauvegardés dans un fichier de préréglage pour une rechargement ultérieur. Les fichiers de préréglage ont l’extension .xprt et sont situés dans le répertoire : <STUDIO_PATH>/<STUDIO_VERSION>/données/<MYCONF>/phares/répertoire préréglé.

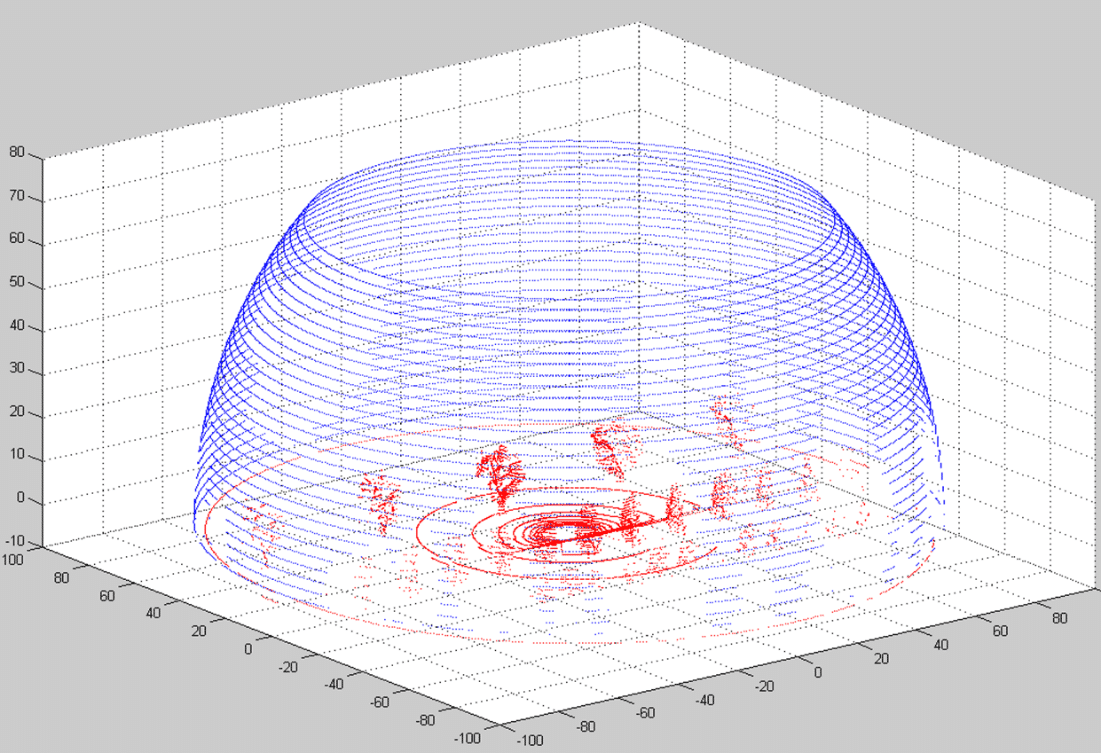
Générateur de Capture d’écran
Cette nouvelle fonctionnalité est incluse dans le Night Test Manager. Avec cette nouvelle fonctionnalité, vous pourrez créer un grand nombre d’images pour comparer plusieurs produits dans les mêmes conditions (préréglages et positions).

Images générées
Cibles en temps réel
Cibles en temps réel
SCANeR prend désormais en charge les plateformes en temps réel dSPACE pour les applications HIL. Tous les nouveaux modules et connexions ont été validés avec succès sur une plateforme en temps réel dSPACE : un modèle de dynamique du véhicule Callas RT déployé et fonctionnant sur une cible RT dSPACE Scalexio. Une attention particulière a été portée à la documentation pour guider l’utilisateur dans l’utilisation et la configuration de l’environnement dSPACE.
Note : L’API Callas n’est pas encore supportée sur dSpace.

Interface ComUDP RT
Pour les applications HIL utilisant le système dSPACE, une interface ComUDP RT a été développée pour permettre une connexion facile avec le module ModelHandler. Cette connexion permet au système RT d’accéder aux entrées et sorties du véhicule et de se connecter à tout modèle de véhicule, tel que CallasRT, qui fonctionnerait sur le système RT.
Callas en temps réel
Le modèle de dynamique du véhicule CALLAS peut être déployé et exécuté facilement sur les cibles en temps réel dSPACE. Il a été testé et validé avec succès dans l’environnement en temps réel dSPACE ControlDesk.
SIMULATION MASSIVE

SCANeR outil de traitement par lots
Nouvelle commande pour mettre à jour les scénarios
SCANeR BatchTool introduit une nouvelle commande pour mettre à jour les scénarios existants et les convertir à la version actuelle du scénario. Pour plus d’informations, ouvrez une invite de commandes dans le répertoire bin de SCANeR et tapez: SCANeRBatchTool.exe –help update-scenario.
Note : L’opération de mise à jour est effectuée automatiquement si vous ouvrez et enregistrez un scénario dans SCANeR Studio. Cette commande est uniquement utile si vous devez convertir un grand nombre de scénarios.
NCAP RÉGLEMENTATIONS
Nouveau pack US NCAP
En collaboration avec notre partenaire UTAC Ceram, nous sommes très fiers de publier ce nouveau pack dédié aux protocoles U.S. NCAP. La NHTSA est l’organisation qui édite les protocoles US NCAP. Par rapport aux scénarios EURO NCAP, il existe des similitudes, des différences et de nouveaux scénarios.
Pour les scénarios US NCAP, les systèmes ADAS testés sont :
- Freinage d’urgence autonome (AEB) :
- CIB (freinage imminent en cas d’accident)
- DBS (assistance dynamique au freinage)
- Assistance à la sécurité aux intersections (ISA)
- Régulateur de vitesse adaptatif (ACC)
- Contrôle du centrage des voies (LCC)
- Assistance à la sécurité du trafic en sens inverse (OTSA)
- Assistance en cas d’embouteillage (TJA)

Le pack contient 98 scénarios individuels, 24 terrains dédiés, des robots de conduite adaptés et un système de notation.
Nouveau Pack CHINA NCAP
En collaboration avec notre partenaire UTAC Ceram, nous sommes très fiers de publier ce nouveau pack dédié aux protocoles China NCAP.
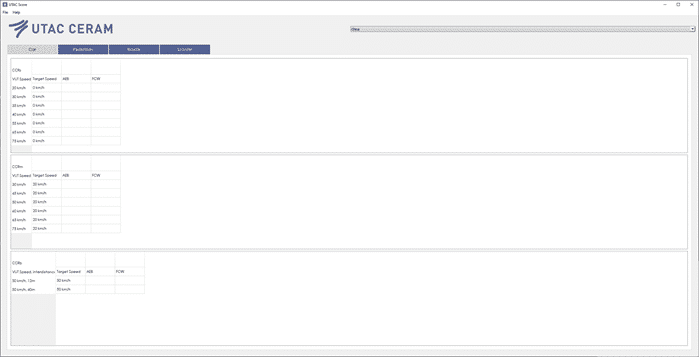
Dans les scénarios China NCAP, seul le freinage d’urgence autonome (AEB) est évalué à l’heure actuelle. La plupart des scénarios sont inspirés des scénarios Euro NCAP. Comme dans le pack Europe, le pack China inclut également UTAC Driver et UTAC Score.
Protocole 2018 :
De voiture à voiture :
- CCRs AEB/FCW
- CCRm AEB/FCW
- CCRb 12m/40m -4m/s²
- Freinage du véhicule sur la voie adjacente (faux positif)
Voiture-piéton :
- CVFA25 : Véhicule pour utilisateur Vulnérable Farside Adult
- CVFA50 : similaire au CPFA50 en Europe
- CVNA25 : similaire au CPNA25 en Europe
- CVNA75 : similaire au CPNA75 en Europe


Le module de score UTAC a été mis à jour pour permettre les évaluations des scénarios chinois.
 |
RECOMMANDATIONS DE LA PLATEFORME
Matériel
| Minimale (pour anciens systèmes) | Recommandée (pour nouveaux systèmes) | |
| UNITÉ CENTRALE | Core i7-4770 | Intel Core i7 10700K / i9 10900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3945WX |
| RAM | 16 Go | 32 Go |
| Réseau | 1 Gbps | 1 Gbps |
| HDD(PC supérieur) | 500 Go | 500 Go SSD To ou plus (pour superviseur) |
| Carte graphique (PC visuel) | Quadro M5000 GeForce GTX 980 | High End NVIDIA Quadro RTX5000/RTX6000 GeForce RTX3080/RTX3090 |
| Carte son (PC son) | 5.1 Dedicated PCIe (Uniquement pour le son PC) | |
| Système d’Exploitation | Windows 10 64bits | Windows 10 64bits |
| Résolutions des Écrans | Full HD (1920×1080) | 4K (3840×2160) |
Logiciels
Système d’Exploitation
Windows 10 64bits
Linux (uniquement pour l’exécution) :
- Ubuntu 20.04
- Centos 8.2
- Centos 7.6
Note : En raison de la fin de vie de CentOS prévue d’ici la fin de l’année, le support officiel de la version CentOS 8 de SCANeR cessera dans la prochaine version 2022.1.
Développement
Visual C++ 2019 et 2015
Python 3.7.3
Matlab Simulink 2016b et 2019b

