

AVSimulation est fier d’annoncer que SCANeR 2021.1, la dernière version de notre logiciel de simulation automobile, est désormais disponible. Elle comprend de nombreuses améliorations et nouvelles fonctionnalités pour répondre aux besoins des applications de simulation les plus complexes pour les ingénieurs et les scientifiques.
Ces nouvelles fonctionnalités aideront à résoudre les défis liés au développement, à l’évaluation et aux tests des systèmes automobiles tout au long du cycle V, du MIL, SIL, HIL et VIL au DIL.
Les principaux sujets incluent un nouveau rendu basé sur le moteur Unreal pour l’immersion du conducteur et la simulation de caméra, un modèle de capteur Lidar physique basé sur la physique pour le niveau L2, de nouvelles fonctionnalités pour les capteurs de niveau L1, de nouveaux scénarios NCAP, ainsi que de nouvelles fonctionnalités pour les applications HIL et VIL, ainsi que pour la modélisation des routes, du trafic, des scénarios et des véhicules.
Comme toujours, SCANeR studio 2021.1 est compatible avec les solutions matérielles et logicielles les plus performantes disponibles sur le marché de la simulation.
La version d’essai de SCANeR studio 2021.1 est disponible, vous pouvez la télécharger ici.
POINTS FORTS
Parmi les nombreuses améliorations, évolutions et nouvelles fonctionnalités, vous trouverez ci-dessous une sélection de caractéristiques d’un intérêt majeur pour vos cas d’utilisation, tels que les ADAS, la conduite autonome, la simulation massive, les phares, la VR et l’AR, ainsi que l’intégration et la supervision des simulateurs de conduite.
Les principales fonctionnalités de cette nouvelle version sont :
- Nouveau rendu basé sur le moteur Unreal pour l’immersion du conducteur et la simulation de caméra.
- Nouveau modèle de capteur Lidar basé sur la physique pour le niveau L2.
- Nouvelles fonctionnalités pour les capteurs de niveau L1, y compris les capteurs de lumière et l’e-horizon avec Adasis V2.
- Nouveau module RosBridge pour une interface simplifiée avec les applications Ros.
- Nouveau module SensorViewer pour l’affichage interactif des sorties de perception et de décision.
- Nouvelles fonctionnalités pour la simulation massive : API de plugin pour SCANeR Explore et outils en ligne de commande.
- Nouveaux scénarios pour les NCAP et régulations : AD, ALKS, US NCAP.
- Performances améliorées (planificateur hors ligne, capteurs, API).
GÉNÉRAL
Introduction
Cette note de version décrit les nouvelles fonctionnalités et évolutions disponibles dans SCANeR 2021.1.
Concernant le nouvel emballage de SCANeR, les nouvelles fonctionnalités énumérées dans le paragraphe suivant sont regroupées par Packs.
Nouveau Packaging
Les fonctionnalités de SCANeR sont désormais organisées en Packs :
- Foundation : regroupe les fonctionnalités standard de SCANeR pour créer des modèles, intégrer les systèmes, simuler et analyser les résultats.
- Packs liés au domaine d’application : AD/ADAS, capteurs basés sur la physique, phares, dynamique du véhicule, facteurs humains.
- Packs liés au banc de simulation : cibles en temps réel, simulation massive, simulateurs
- Contenu supplémentaire : NCAP et régulations.
- Autres applications : éducation, simulateurs de formation.


corrections de bug
Cette version de SCANeR studio inclut également tous les correctifs et améliorations des versions précédentes, y compris SCANeR studio 1.9, ainsi que des versions spécifiques aux clients.
FONDATION
Nouveau moteur de rendu 3D (Unreal)
Rendu
Un nouveau module de rendu, URenderer, basé sur le moteur Unreal en temps réel le plus avancé, permet de produire des images photoréalistes de haute qualité. Il bénéficie des dernières technologies 3D : rendu basé sur la physique, matériaux et éclairage avancés, ray-tracing, ainsi que des paysages et de la végétation optimisés.
Le module est entièrement intégré à SCANeR et propose des fonctionnalités prêtes à l’emploi :
- Configuration simple
- Chargement et conversion des ressources depuis le terrain et les scénarios
- Animations des véhicules et des piétons
- Cycles jour/nuit avec
- Effets météorologiques : atmosphère, nuages volumétriques, pluie et neige, brouillard, vent
- Sources lumineuses multiples
Cette première version est livrée en tant que Beta, n’est pas encore complètement fonctionnelle et n’a pas été validée dans une configuration multi-écrans. Le module VISUAL existant est toujours disponible.
Préparation des ressources
Avec ce nouveau module de rendu, nous proposons une solution très complète et flexible pour intégrer vos ressources, adaptée à des processus de production variables et à différents niveaux d’expertise :
- Les ressources SCANeR existantes en OSG sont automatiquement converties et enrichies.
- Les matériaux routiers peuvent être directement attribués en mode terrain dans SCANeR studio et exportés au format natif d’Unreal.
- Les ressources converties peuvent toujours être modifiées et enrichies à l’aide de l’Unreal Editor.
- Les ressources produites par divers outils peuvent être converties et intégrées.
- Accès à des milliers de ressources de haute qualité depuis le marketplace Unreal.
Personnalisation
Comme toujours avec SCANeR, nous offrons des fonctions avancées permettant aux utilisateurs experts de personnaliser le rendu et de développer leurs propres applications :
- Les fonctionnalités d’intégration de SCANeR sont également livrées sous forme de plugins :
- La simulation peut être exécutée directement dans l’éditeur pour un réglage facile et rapide.
- Un projet modèle est fourni comme point de départ.
SensorViewer et Objets Graphiques
Avec cette nouvelle fonctionnalité, vous pourrez améliorer le suivi et l’analyse de vos simulations en affichant des informations graphiques superposées à la scène 3D et en permettant une manipulation facile du point de vue.
Les principales fonctionnalités sont :
- Objets graphiques primitifs : boîtes, polylignes, points, texte
- Génération à partir des capteurs pour les cibles ou les détections de routes/voies
- Module SensorViewer pour afficher les objets graphiques et explorer la scène pendant la simulation
- Affichage des objets graphiques pour l’analyse post-simulation dans le module AnalysingTool
- API pour créer vos propres objets graphiques à partir de vos scripts de scénario ou applications personnalisées

Améliorations du Terrain
Importation de nuages de points
Un nouvel outil en ligne de commande facilite la conversion, l’optimisation et l’importation directe de nuages de points dans SCANeR.

Génération améliorée des intersections
La génération 3D des intersections complexes a été améliorée pour mieux correspondre aux connexions logiques, y compris les bordures de route.
Support d’OpenCRG
Le format standard ASAM OpenCRG, décrivant la surface de la route, est désormais pris en charge par SCANeR. Les fichiers CRG peuvent maintenant être importés dans le terrain SCANeR et ajoutés comme patches de rugosité qui interagiront avec les modèles de pneus des dynamiques de véhicule.

Améliorations du trafic et des scénarios
Conduite en marche arrière
Le conducteur du trafic est désormais capable de conduire en marche arrière et de suivre la route. Cette manœuvre peut être déclenchée à partir du script de scénario, et les autres véhicules de trafic réagiront en conséquence.

Améliorations du trafic
L’algorithme de perception et de décision des conducteurs de trafic a été amélioré pour mieux analyser et anticiper les marquages de voie et la topologie :
- Meilleure computation des voies optimales pour suivre un itinéraire
- Atteindre l’objectif souhaité tout en minimisant le nombre de changements de voie
- Meilleure anticipation et placement près des carrefours complexes ou des sorties d’autoroute
- Adaptation des paramètres de manœuvre (vitesse, durée) aux contraintes d’infrastructure

Paramètres du scénario
Pour simplifier la tâche de test d’un scénario avec différents paramètres, il est désormais très facile de modifier les valeurs des paramètres et de lancer la simulation sans avoir à sauvegarder et modifier le scénario à chaque fois.

Architecture SDK
Simulation hors ligne
Une nouvelle option a été ajoutée pour les simulations hors ligne afin d’améliorer la vitesse de calcul pour les applications qui peuvent accepter une moindre reproductibilité

Amélioration des performances de l’API SCANeR
Avec une nouvelle interface C++ permettant un accès direct à la structure des messages, les performances ont été considérablement améliorées. Les blocs Simulink et RT-Maps ont été mis à jour pour utiliser cette nouvelle interface sans nécessiter de modifications de la part de l’utilisateur.
AD/ADAS

Nouvelle caméra photoréaliste
Le module URenderer peut également être configuré pour simuler une caméra automobile et produire des images photoréalistes avec des effets de caméra typiques : distorsion de lentille, flou de mouvement, exposition automatique, flare de lentille, ajustement des couleurs.
Le module bénéficie des mêmes fonctionnalités que le nouveau moteur de rendu 3D.

Nouveau module RosBridge
RosBridge est un nouveau module qui simplifie l’interface avec les applications Ros 2. Le module transforme automatiquement les messages SCANeR™ en messages Ros. Un système de plugins et une API permettent à l’utilisateur de développer ses propres plugins pour coder des traductions personnalisées.
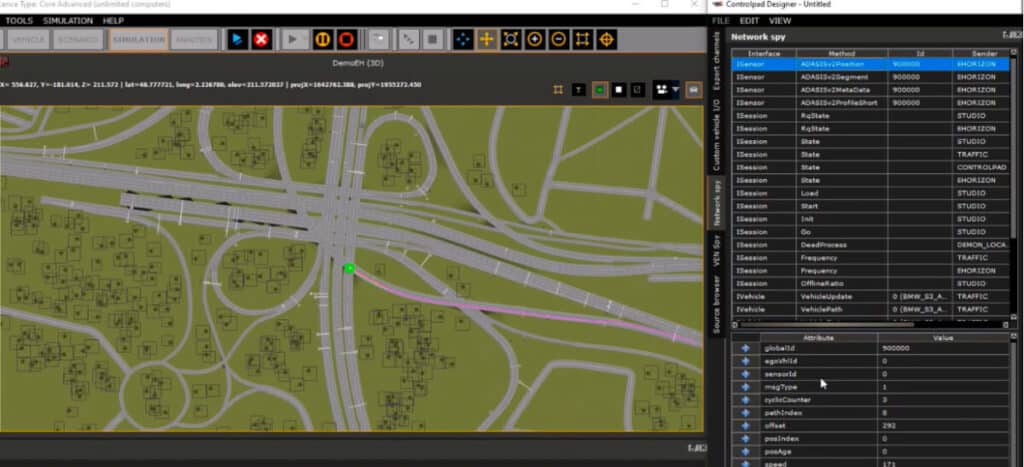
Nouveau capteur e-Horizon L1
Un nouveau module agissant en tant que fournisseur d’e-horizon a été ajouté au pack AD/ADAS pour délivrer des messages codés avec le protocole ADASIS V2 à vos applications ADAS.
Les messages sont émis sur le bus SCANeR et peuvent être accessibles via l’API en mode clair ou binaire.
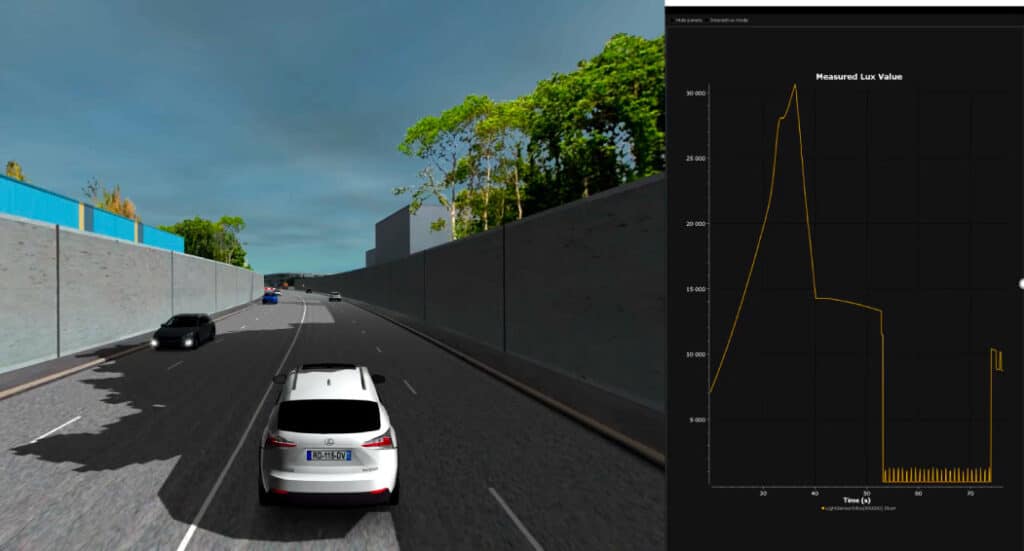
Nouveau capteur de lumière L1
Le nouveau capteur de lumière peut calculer l’illuminance perçue au niveau du capteur en tenant compte de toutes les sources lumineuses (phares des véhicules, lampadaires, etc.) dans la scène et des conditions environnementales : position du soleil, densité des nuages, brouillard et ombres, tunnels.

Améliorations du capteur L1
Amélioration des performances du LIDAR
Les performances du modèle L1 LIDAR ont été considérablement améliorées grâce à l’optimisation du multithreading et de la mémoire. Plus de 500 000 points/s peuvent désormais être générés en temps réel pour simuler la plupart des LIDARs courants sur le marché.
Amélioration des performances de la caméra et du radar
Les performances des modèles logiques de caméra et de radar L1 ont également été significativement améliorées en permettant la définition de plusieurs stratégies pour le calcul de la visibilité des cibles.
Trois options peuvent être configurées :
- Désactiver tous les tests de visibilité
- Effectuer des tests tous les N frames, avec équilibrage de la charge de calcul
- Identique aux options précédentes + visibilité des points
Ces options permettent de faire fonctionner le module jusqu’à 3 fois plus rapidement.
Capteurs basés sur la physique
Nouveau LIDAR physique basé en temps réel L2
Un nouveau modèle de capteur LIDAR physique en temps réel L2 a été développé en collaboration avec OKTAL-SE.
Ce modèle repose sur le moteur basé sur la physique éprouvé d’OKTAL-SE et offre les fonctionnalités suivantes :
- Description avancée du LIDAR :
- Intensité du faisceau laser
- Divergence du faisceau (faisceaux non parfaits)
- Forme du point d’impact du faisceau
- Calcul basé sur la physique :
- Réflexions des matériaux physiques : la radiance est calculée pour chaque rayon
- Échos incluant des impacts sur plusieurs cibles

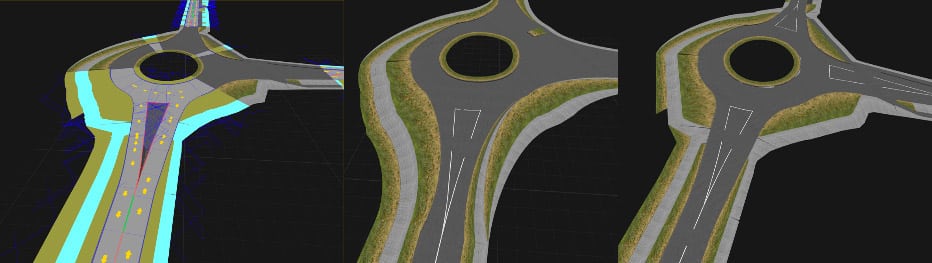
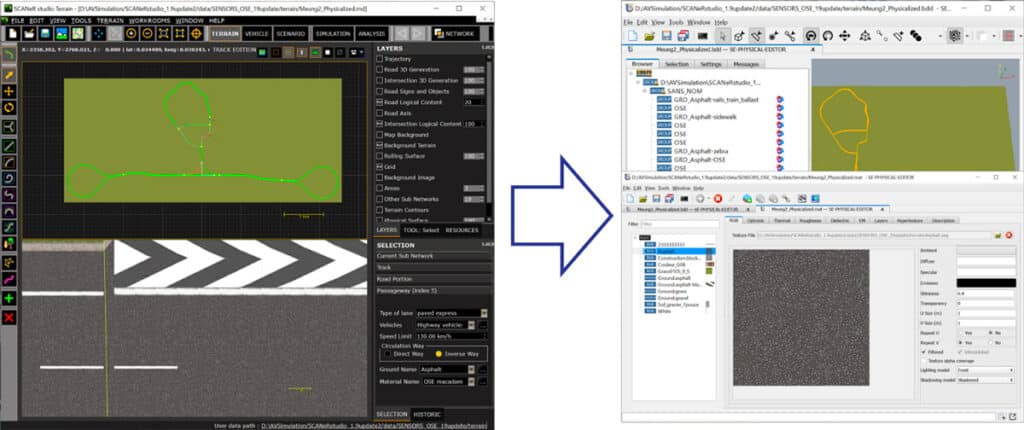
Exportation des matériaux depuis le terrain SCANeR
La création de scènes pour les capteurs basés sur la physique est désormais simplifiée : les matériaux basés sur la physique peuvent être directement attribués en mode terrain SCANeR studio et exportés directement. Aucune conversion supplémentaire n’est nécessaire !
Real Time Targets
Support amélioré pour NI VeriStand
Le support de NI VeriStand pour les applications Hardware In the Loop a été amélioré afin de simplifier les opérations nécessaires au déploiement de la simulation sur la cible RT :
- La vérification de la licence se fait désormais côté hôte
- Un périphérique UDP standard est maintenant utilisé
- Les requêtes routières peuvent désormais être effectuées directement sur la cible
- Les données de simulation peuvent être exportées depuis le menu Fichier
Simulation Massive

Plugin SCANeR Explore
SCANeR Explore dispose désormais d’un nouveau système de plugins pour spécialiser la manière dont la simulation est exécutée et comment les résultats sont obtenus. Par défaut, un plugin d’exécution locale est fourni, et une API permet au client de développer des plugins pour interfacer sa propre plateforme de simulation massive.
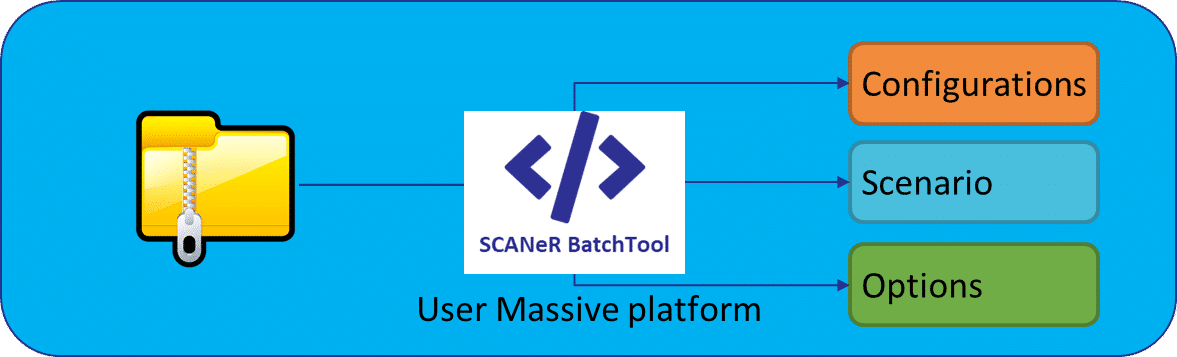
Outil SCANeR Batch
Pour faciliter le déploiement et la configuration de SCANeR, nous avons développé un nouvel outil en ligne de commande nommé SCANeR BatchTool.
Cet outil offre de nombreuses commandes et options très utiles :
- Gérer le chemin des données
- Manipuler les configurations
- Exporter et importer des scénarios
- Changer la configuration entre simulations en temps réel et hors temps réel
- Manipuler les modules au sein d’une configuration
NCAP Regulations
UTAC CERAM et AVSimulation ont signé un accord de partenariat visant à offrir à nos clients respectifs une gamme complète de scénarios de simulation incorporant les principaux protocoles réglementaires et de tests Euro NCAP. Grâce à ces scénarios, les utilisateurs de SCANeR peuvent évaluer les performances de leurs systèmes, de la phase de conception au cycle de développement. Cela permet de réduire le temps et les coûts associés au développement et à la validation des futurs véhicules et systèmes.
N’hésitez pas à télécharger notre version d’essai du scénario Euro NCAP par UTAC CERAM ici .
Pack de scénarios Euro NCAP
Le pack EuroNCAP est continuellement mis à jour avec de nouveaux scénarios.
Le pack complet comprend désormais les protocoles suivants :
- Euro NCAP AEB 2020
- Euro NCAP LSS 2020 (Système de soutien à la conduite en ligne)
- Euro ALKS Reg (Systèmes de maintien de voie)
- AEB R152 REG (Système de freinage d’urgence autonome selon la réglementation R152)
- Euro NCAP AD (conduite autonome)
Le pack comprend également :
- Le circuit de test virtuel TEQMO
- Les modèles de robots de conduite UTAC CERAM
- Le module de notation UTAC CERAM
Pack de scénarios US NCAP
Nous publions le nouveau pack de scénarios USNCAP comprenant les protocoles suivants :
- US NCAP AEB 2020 (Système de freinage d’urgence autonome)
- US NCAP LSS 2020(Système de soutien à la conduite en ligne)
- US NCAP Heavy AEB 2020 (Système de freinage d’urgence autonome pour véhicules lourds)
Le pack comprend également :
- Le circuit de test virtuel TEQMO
- Les modèles de robots de conduite UTAC CERAM
- Le module de notation UTAC CERAM
Exigences de la plateforme
Matériel
| Minimale (pour anciens systèmes) | Recommandée (pour nouveaux systèmes) | |
| UNITÉ CENTRALE | Core i7-4770 | Intel Core i7 10700K / i9 10900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3945WX |
| RAM | 16 Go | 32 Go |
| Réseau | 1 Gbps | 1 Gbps |
| HDD(PC supérieur) | 500 Go | 500 Go SSD To ou plus (pour superviseur) |
| Carte graphique (PC visuel) | Quadro M5000 GeForce GTX 980 | High End NVIDIA Quadro RTX5000/RTX6000 GeForce RTX3080/RTX3090 |
| Carte son (PC son) | 5.1 Dedicated PCIe (Uniquement pour le son PC) | |
| Contrôle des résolutions | Full HD (1920×1080) | 4K (3840×2160) |
Logiciels
Système d’Exploitation
Windows 10 64bits
Linux (uniquement pour l’exécution) :
- Ubuntu 20.04
- Centos 8.2
- Centos 7.6 (le support s’arrêtera dans la version 2022.1)
Développement
Visuel C++ 2019 et 2015
Python 3.7.3
MATLAB Simulink (le support 2016b s’arrêtera dans la version 2022.1)

