

AVSimulation is proud to announce that SCANeR 2023.2, the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help solve the challenges of developing, testing and evaluating autonomous and advanced driving functions through intensive use of the simulation all throughout the R&D process.
The main topics of this new version are OpenScenario support, improvement of our new terrain, an experimental multiplayer feature, support of the Varjo XR3 headset and a new NCAP packaging.
As always, SCANeR 2023.2 is compatible with the highest performance hardware and software solutions available on the simulation market.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- ASAM OpenScenario support
- Improvement of our new terrain editor with road styles
- Experimental multiplayer feature to connect distant driving simulators
- UXD Engine now supports VR/XR experiences with the Varjo XR3 headset
- Many bug fixes for improved performance and stability
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2023.2.
With respect to the new packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR to create models, integrate systems, simulate and analyse results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulation, 3D environments
- Other applications: Education, Training Sim


Bug fixes
This version of SCANeR also includes all bug fixes and improvements from previous releases, including SCANeR 2022.2, 2023.1 and customer-specific versions.
FOUNDATION
TERRAIN Mode
New features
Ergonomics: road style editor
On this new version, we have introduced the concept of road styles. Road styles allow user to define the style of a portion.
All road styles are available in the resources dock. Any road style can be dragged and dropped on a lane to be directly applied. Users can define their own or modify existing road style by right clicking or double clicking on a road style.
Users can define what will be the default road style. It will be used for all new road creation.
Users can also apply a road style on different segments with an “Apply” tool.
Users can also select multiple portions to apply road styles.
UXD engine (powered by Unreal)
Note: UXD Engine is not yet capable of addressing all SCANeR use cases. For this reason, the original VISUAL module, based on Open Scene Graph, is still available.
New features
VR/XR application
- These features require specific settings.
- Requires user knowledge on Unreal and Varjo-XR3 integration.
SCANeR is now compatible with OpenXR and the Varjo-XR3.
UXDRender configuration file has been updated with new Varjo-XR3 mixed reality features including:
- Chroma key: blend real world camera feeds with 3D worlds by replacing specified chroma key color with 3D world scenes

- Depth occlusion: blend real world camera feeds with 3D worlds by comparing 3D World depth buffer to the Varjo-XR3 LIDAR depth data

- Masking: blend real world camera feeds with 3D worlds based on mask assets placed in the 3D world

Cockpits
We have added a new feature which helps import CAD as cockpits in SCANeR.
Users provide a manifest file (.json format) containing information required to drive the conversion process which will produce a SCANeR cockpit in the form of an .xcpt file, .pak file and a placeholder 3D asset for the CockpitEditor module.
The feature is available in the SCANeRToolBar Unreal Engine plugin and can be used in two ways:
- Through a commandlet
- With Unreal Editor
The conversion uses the Unreal Engine Dataprep feature to process and optimize the CAD best for SCANeR.
Simulation Mode
New features
KPI
This new version allows the user to define and compute KPI for the simulation, to analyze the behavior of the vehicle or system under test.
A new button is available in the SCANeR studio Toolbar to set up a KPI configuration, to select the KPI configuration to use in the simulation.

A KPI configuration lists the KPIs to be computed with the specified parameters. KPIs can be chosen among the default ones, or custom KPIs can be created.

The selected KPI configuration will be computed during the simulation and produce the results in the record folder.
OpenScenario support
This new version supports the importation and simulation of a scenario made with the OpenScenario standard.
The supported version of OpenScenario is 1.2 (OpenScenario 2.0 isn’t supported yet).
SCANeR provides a tool to import an OpenScenario files, and a new module to execute the OpenScenario dynamic scripting during simulation.

Explore parameter improvements
The concept of explore parameters has been enhanced: users can now attach more than one scenario variable to an explore parameter. For example, only one explore parameter could be used to define a variable which sets the same initial speed for all vehicles in scenario.
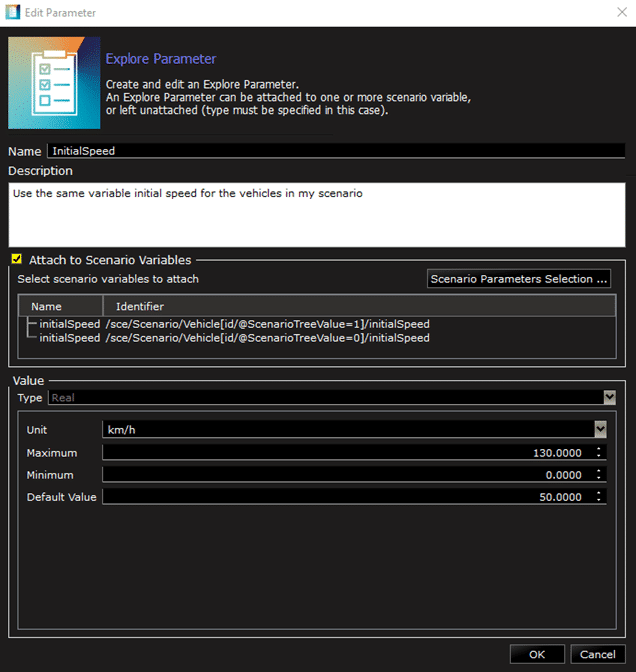
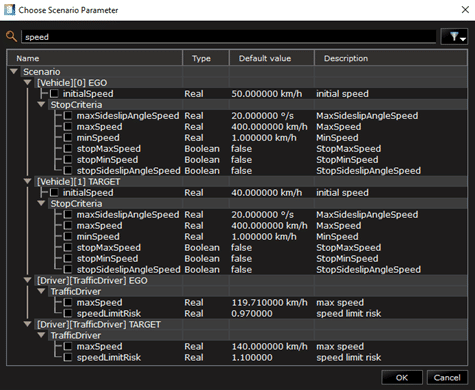
The GUI for explore parameter definition has been improved, by adding a search bar and filter options.
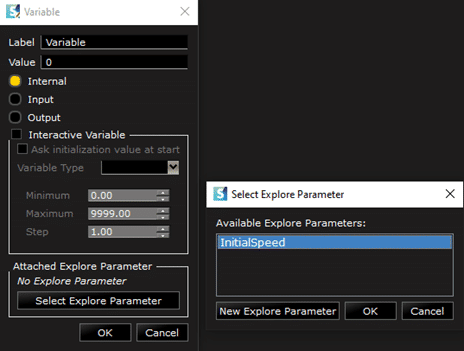
We also added shortcut in the MICE editor to easily attach a MICE variable to an explore parameter.
SENSORS
SENSOR OUTPUTS
Lidar, camera and radar plugin
A new sensor plugin API has been developed that gives easier access to sensor outputs outside SCANeR. It is accessible through the usual sensor output interface, by selecting the plugin from a list:
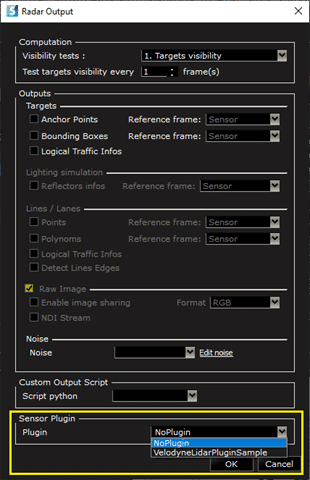
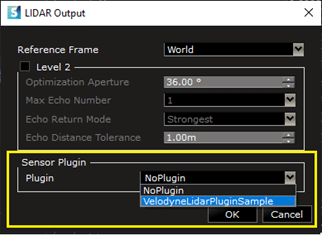
This API is a powerful way to output SCANeR sensor data without using the SCANeR API, for instance to plot Lidar point clouds into a dedicated visualization tool:

VEHICLE DYNAMICS
VEHICLE MODE
Curve setting and visualization
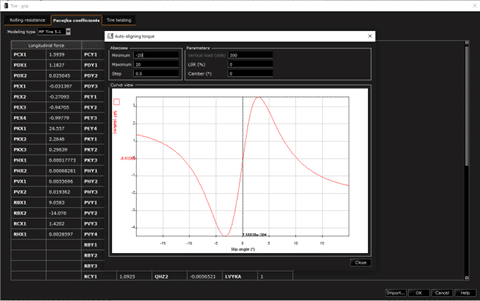
Pacejka tire models
To facilitate the setting of Pacejka tire models, a graph of longitudinal/lateral forces and self-aligning torque can now be plotted:
1-D curve data resampling
To allow the user to add some more data in an existing table, a specific functionality to resampling input data has been added.

NEW FEATURE
Multiplayer simulation (experimental)
This new feature in SCANeR studio 2023.2 allows users in different locations to share the same scenario and run the same simulation together, each driving their own car with their own simulator.
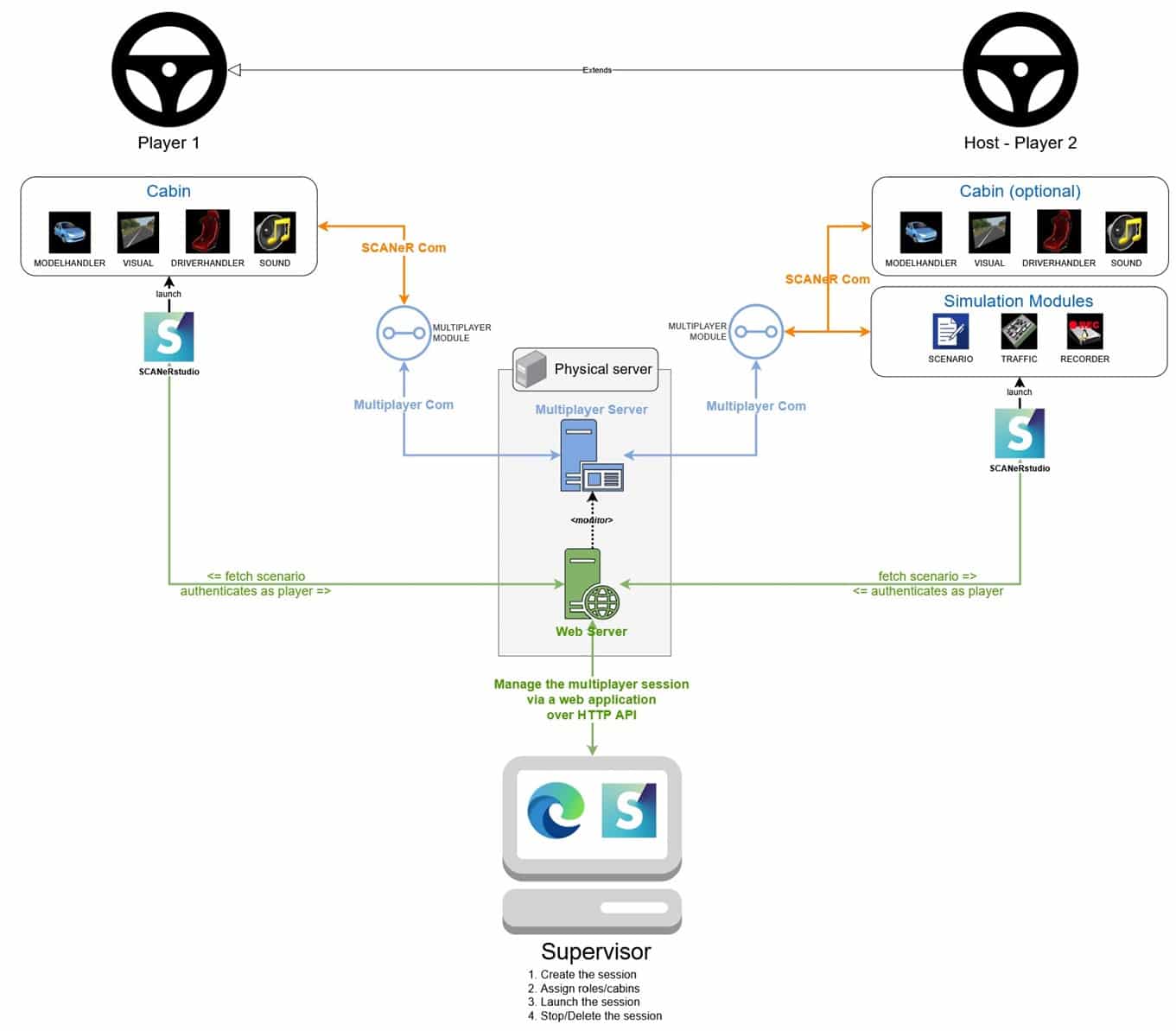
We provide a small web-based application to create and host the server used by the multiplayer simulation. Participants can join an open session, select a vehicle to drive, and download the scenario.
Once all participants are ready, they can start the simulation in SCANeR studio and launch the new Multiplayer module to run a multiplayer simulation.
This feature is experimental and require a specific license. If you are interested in an evaluation or a quotation, please contact your sales representative.
NCAP & REGULATIONS

2023.2 UPDATE TO NCAP & REGULATIONS PACK
New pack organization: entry & advanced
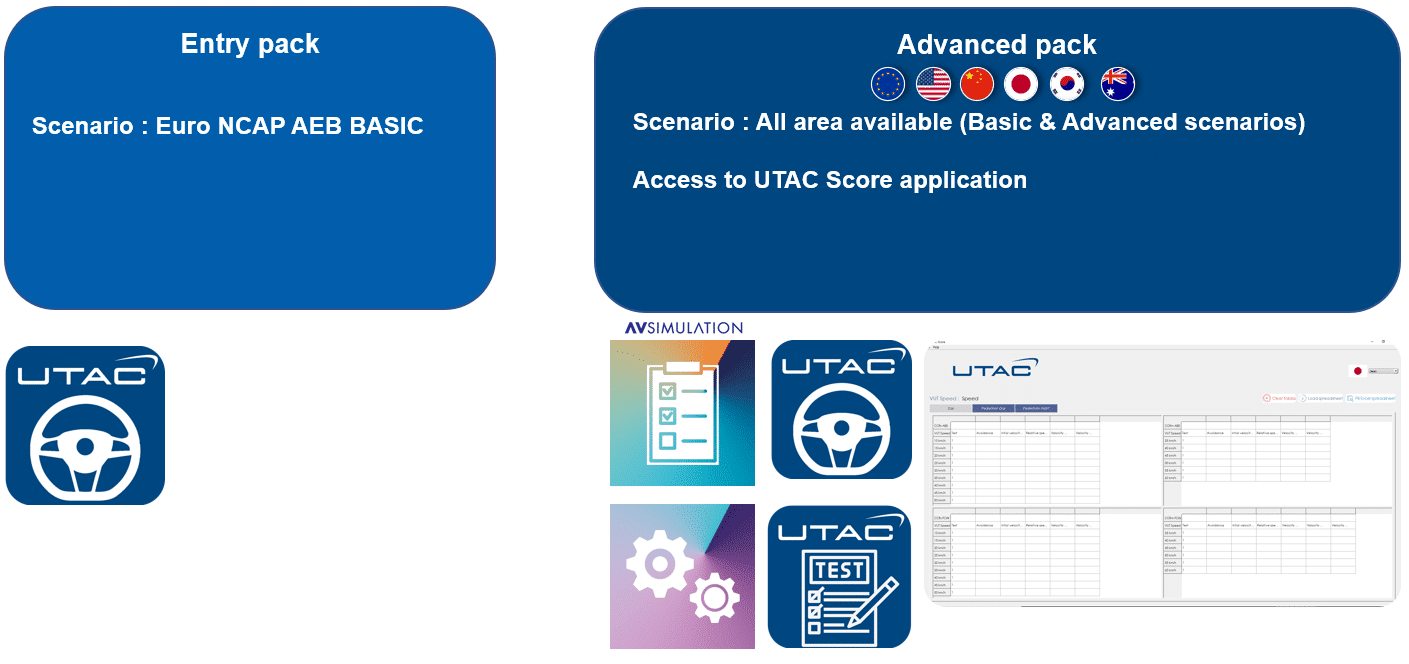
This year, we introduce a new packaging for NCAP & REGULATIONS packs compared to previous years. We now have only 2 packs available: Entry pack & Advanced pack.
Why did we choose to this new format?
Firstly, the Entry Pack is meant to be used with the AD/ADAS Pack. It allows customer to validate their ADAS & AD systems in a first stage of development. It gives also a scenarios reference insight.
In addition, with the new Advanced Pack, you have access to all scenarios from all the following area in one single pack, for the price of one area pack before: EU, Australia, Japan, Korea, China, US. It makes easier the validation across the different protocols without install or uninstall the packs.

Which use cases can you address?
The Entry Pack was made to be used in the early stage of development. It allows to quickly test ADAS AD systems or vehicles on simple scenarios, before validating them on more complex use cases.
The Advanced Pack allow you to achieve a full validation and an assessment according to official protocols of your system. Moreover, It will challenge your ADAS & AD systems to more complex use cases, with high fidelity scenarios which include real trajectories encountered on proving ground. The Advanced Pack make possible the use of SCANeR explore and SCANeR compute, allowing you to save time & cost thanks to the massive simulation. Finally, you will have a virtual assessment and the rating thanks to the app UTAC Score. As an example, you will be able to output the prediction spreadsheet of EuroNCAP thanks to the simulation

New feature: physicalized targets now available in packs
Both the ENTRY and ADVANCED packs now include the following physicalized targets, compatible with the ” PHYSICS BASED SENSORS” packs.
- NCAP_Bicycliste_Target
- NCAP_Motorcyliste_Target
- NCAP_Global_Vehicle_Target
- NCAP_Pedestrian_Target_Adult

PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 12700K / i9 12900K Intel Xeon E/W AMD Ryzen 7 7800X / Ryzen 9 7900X AMD ThreadRipper Pro 5955WX |
| RAM | 16 GB | 32/64 GB |
| Network | 1 Gbps | 1 Gbps |
| Storage(Workstation or Supervisor PC) | 500 GB | 1TB SSD |
| Graphic Board (Visual PC) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| OS | Windows 10 64bits | Windows 10 64 bits (22H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10/11 64 bits
Linux (only for supported modules):
- Ubuntu 20.04 LTS
- Centos 7.9 (depecrated)
- Rocky Linux 8 (redhat 8 compatible) (cf migration chapter in documentation)
Development
Visual C++ 2019 and 2015
Python: 3.9 on Windows, 3.8 on Ubuntu, 3.7 on Centos
Matlab Simulink 2016b and 2019b
Unreal Engine 4.27.2 (only for advanced customization or asset production)

