

AVSimulation is proud to announce that SCANeR 2022.1, the latest major version of our automotive simulation software package, is now available. It includes many new features and enhancements to meet the needs of the most challenging simulation applications for engineers and scientists.
These new features will help solve the challenges of developing, testing and evaluating autonomous driving functions through massive simulation, an area of utmost importance for most of our customers.
The main topics are improvements of the first official release of our new UXD rendering engine, integration with Dassault 3DEXPERIENCE platform, a new pack for modeling special vehicles and updated NCAP packs covering more protocols.
As always, SCANeR 2022.1 is compatible with the highest performance hardware and software solutions available on the simulation market.
HIGHLIGHTS
Among many improvements, evolutions and new features, you will find below a selection of features of utmost interest for your use cases such as ADAS, Autonomous driving, Massive simulation, Headlights, VR & AR, HIL/VIL, Driving simulator integration and supervision.
The major features of this new version are:
- UXD engine is now official for simulators and Camera sensor,
- SCANeR interfaced with DASSAULT 3DEXPERIENCE platform
- Special vehicle pack
- Japan NCAP scenario pack
GENERAL
Introduction
This release note describes the new features and evolutions available in SCANeR 2022.1.
With respect to the new packaging of SCANeR the new features listed in the following paragraphs are regrouped per Pack:
- Foundation gathers the standard features of SCANeR to create models, integrate systems, simulate and analyse results
- Packs related to the application domain: AD/ADAS, Physics Based Sensors, Headlights, Vehicle Dynamics, Special Vehicles, Human Factors
- Packs related to the simulation bench: Real Time Targets, Massive Simulation, Simulators
- Additional content: NCAP & Regulation, 3D environments
- Other applications: Education, Training Sim


Bug fixes
This version of SCANeR also includes all bug fixes and improvements from previous releases, including SCANeR 1.9, 2021.2, and customer–specific versions.
FOUNDATION
UXD Engine (powered by Unreal)
Our new 3D rendering is now called “UXD engine” and is officially integrated in SCANeR. All modules and documentation have been updated to mention UXD.
Urenderer module is now called UXDRender and SCANeR_UEngine is now called UXDEngine.
Note: UXD Engine is not yet capable of addressing all SCANeR Use Cases. Consequently the original VISUAL module, based on Open Scene Graph, is still available.
New features
Semantic segmentation
For deep learning applications SCANeR can be used to generate segmented images.
The images are generated in false colors, each pixel color corresponding to an object class or instance.
Classes and colors can be specified in a configuration file.


Integration of IES for default light simulation
Realistic IES files are now used for vehicle headlamps. For now, those files are not configurable.


Support of camera sensor and visual functions
A new GUI is available for Camera post-process configuration.
All the features of UXD Engine can also be used to produce Camera sensor images.
As before in SCANeR, images can be shared and processed in real-time thanks to SCANeR Image Sharing API.
The Snapshot function now works with UXDRender camera and visual channel.



Standard Camera

360°

Fish-Eye
Dynamic Traffic message sign
Dynamic traffic message signs are now supported by UXDRender. They can display simple text and images to give visual information.

Improvement
General improvements, stabilization and optimization have been performed on the UXDRender module.
Simulator use
The Rendering module is now compatible with simulator use.
Dynamic warping is supported through external plugins developed by the technology suppliers:
- Scalable Display
- Vioso
- Dome projection
We also support tracking systems based on Unreal LiveLink. They can be used with head tracker SCANeR’s module or directly connected to the tracking system.


3D Assets
New trees assets compatible with both OSG and UXD engine are available.


New high-quality pedestrian assets have been added:
5 new children + 21 new adults

Controlpad
We have added new features and improvements to the ControlPad module to help the user manipulate graphs during the simulation.
New Features
The following features have been added to the graph widget:
- Create an X/Y graph
- Possibility to highlight a signal in the graph
- Add a second ordinate to the graph


A search bar has been added to help finding the signal to display.

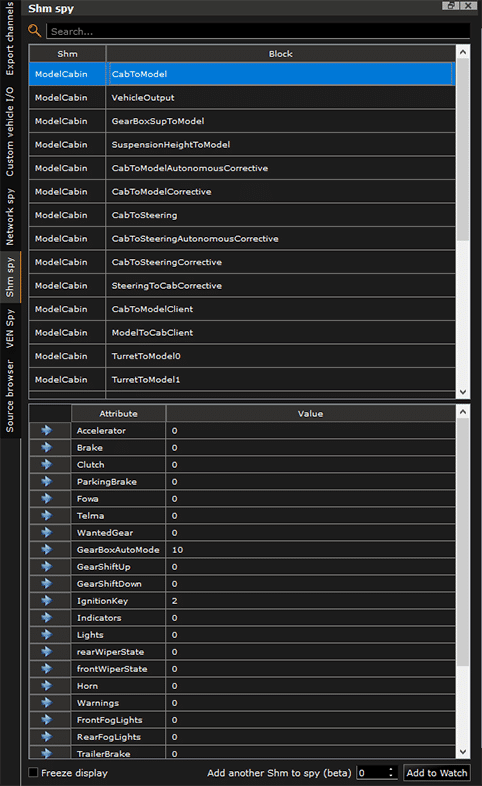
A new “Shm spy” tab has been added, to display signals from the shared memory:
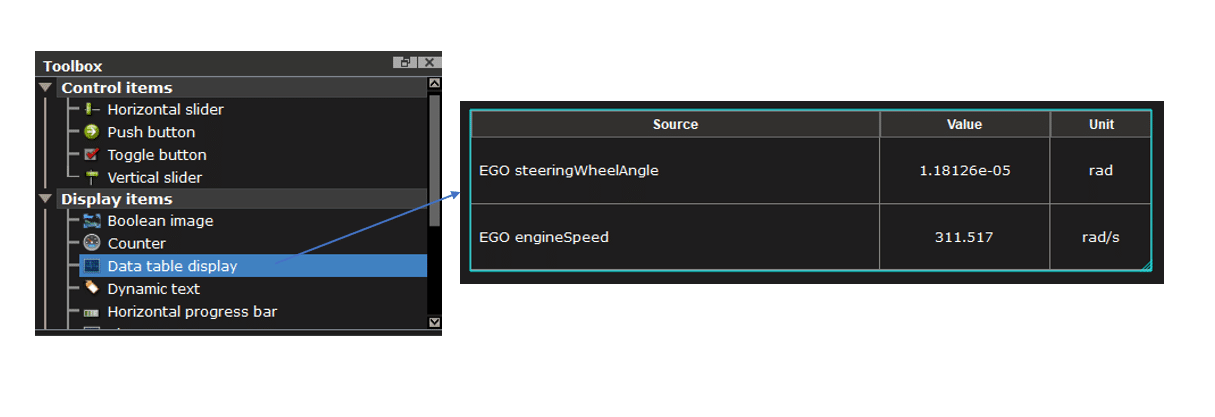
A new Data table display has been added to facilitate the display of several signals.
Improvements
Graph manipulation in ControlPad has been improved with the following features:
- Move in the graph by holding left-click
- Zoom in Y axis with mouse wheel
- Zoom in second Y axis with Ctrl + mouse wheel
- Add marker with right-click

STUDIO GUI
New Feature: Import scenario
You can now import a scenario (in .zip format) in your configuration. In combination with the export scenario function, it’s now easier to share scenarios between different SCANeR users or different configurations.

FMI Support
Several improvements have been made for supporting FMI standard :
- FMU mapping now supports SCANeR SHM protocol
- Support of FMI discrete variability
- New FMU samples: CruiseControl, LaneKeeping, SpeedLimitor
- FMUs are included in the scenario export

REAL TIME TARGETS
CALLAS API with NI Veristand RT Targets
For National Instrument Real Time targets, it now becomes possible to connect external models to the CALLAS RT vehicle model, through Matlab Simulink.
The user only needs to compile its model with the NI dedicated compilation target file which is provided.
Support of EtherCAT communication protocol
In the context of the ROADS simulator project, the communication protocol has been added and is now supported in SCANeR. On ROADS simulator, it is used (instead of usual UDP connection) to connect the ACQUISITION module to the “Beckhoff” real-time computer.

Vehicle in the Loop
SCANeR 2022.1 is ready for VIL (Vehicle In the Loop) applications:
- Full compatibility with vehicle instrumentation & positioning system
- Tools and methods to create scenarios and calibrate Real and Virtual
- Interfaces with the ADAS ECUs
- Displays and monitoring tools


SPECIAL VEHICLES
Introduction
A new pack is available in SCANeR: the Special Vehicles pack.
This pack adds extra features to the Vehicle Dynamic pack for off-road and off-highway applications:
- Vehicles can be equipped with one or several turrets (with or without guns)
- Vehicles can be equipped with tracks (military vehicles or off-road vehicles, for example for snow-covered grounds)
- Off-road vehicles.
In addition, a very advanced soft ground model has been added: Terramechanics.
Sample models are available in a dedicated Add-on installer.
Vehicles with turrets
Turrets are now supported through the Special Vehicles pack, enabling the user to define one or several turrets and guns.
A vehicle sample is provided for demonstrating the feature.

Vehicles with tracks
Tracked vehicles can also be simulated within CALLAS vehicles, covering both for civil and military applications.
A vehicle sample is provided to underline these new functionalities in CALLAS vehicle.

Terramechanics
Dedicated to off-road vehicles, the Terramechanics model aims at modelling soft soil behavior, and tire-ground interaction. It is based on Bekker’s theory, and can be set up through the provided set of parameters for various types of grounds.
NCAP & Regulations


New Pack Japan NCAP
Together with our partner UTAC we are very proud to release this new pack dedicated to Japan NCAP protocols.
The pack covers the following 109 template scenarios (107 AEB & 2 LSS):
| Car-to-Car: CCRs AEB/FCW CCRm AEB/FCW CCRm AEB/FCW | Partial Evaluation: CPN25 AEB/FCW CPN50_8kmh AEB/FCW CPN50_Child AEB/FCW CPN75 AEB/FCW CPNO50_Child AEB/FCW NIGHT_WithoutSL_CPF25 AEB/FCW NIGHT_WithoutSL_CPF50_8kmh AEB/FCW NIGHT_WithoutSL_CPF75 AEB/FCW NIGHT_WithtSL_CPF25 AEB/FCW NIGHT_WithSL_CPF50_8kmh AEB/FCW NIGHT_WithSL_CPF75 AEB/FCW |
| Car-to-Pedestrian: CPN50 AEB/FCW CPNO50 AEB/FCW (NEW!) NIGHT_WithoutSL_CPF50 AEB/FCW NIGHT_WithoutSL_CPFO50 AEB/FCW (NEW!) NIGHT_WithSL_CPF50 AEB/FCW NIGHT_WithSL_CPFO50 AEB/FCW (NEW!) |

NIGHT_WithSL_CPFO50 AEB/FCW
For the night scenario with surrounding lights, the illumination has been set up and calibrated to meet the protocol conditions:
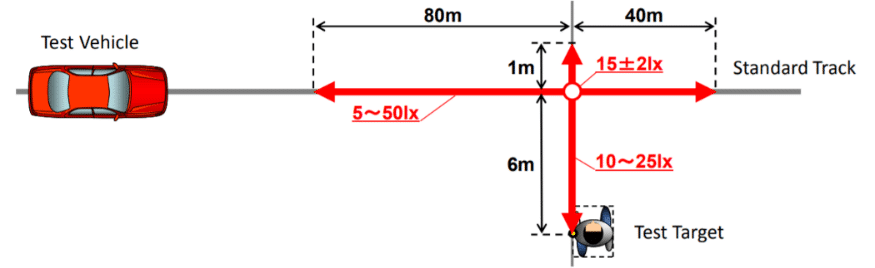

Lighting conditions and verification made with virtual Light Sensor
Lane Support System:
- LSS_LKA_DL_RIGHT_0_3
- LSS_LKA_SL_LEFT_0_3

LSS_LKA_SL_LEFT_0_3
The UTAC Score module has been updated in order to include the assessment for Japan scenarios.

Coming in early Q1 2022:
New 3D for the obstacle vehicle in the Japan Pack:

Korean pack:
In the Korean NCAP pack, AEB, LKA and FCW systems are assessed.
For AEB and FCW, 48 scenarios are available to evaluate the system performance. The three targets NCAP are: Bicyclist, Pedestrian and Vehicle.
For LSS, 26 scenarios are included in the pack with 2 unseen scenarios.
Australian pack:
The Australian NCAP pack contains the same scenarios as the European protocol. However, all the scenarios were adapted to right-hand drive application.
| Car to Car scenarios: Car to Car Rear Stationary AEB & FCW Car to Car Rear Moving AEB & FCW Car to Car Rear Braking 02G, 06G AEB & FCW Car to Car Front Turn-Across-Path | Car to Pedestrian scenarios: Car to Pedestrian Farside Adult Car to Pedestrian Nearside Adult Car to Pedestrian Nearside Child Car to Pedestrian Longitudinal Adult Car to Pedestrian Turning Adult Car to Pedestrian Reverse Adult | Car to Bicycle scenarios: Car to Bicycle Nearside Adult Car to Bicycle Nearside Adult Obstructed Car to Bicycle Farside Adult Car to Bicycle Longitudinal Adult | LSS scenarios: Road Edge tests (ELK) Solid line tests (ELK) Oncoming vehicle (ELK) Overtaking vehicle (ELK) Dashed line tests (LKA) Solid line tests (LKA) |
New PTW 3D model:

SCANER POWER’BY

SCANeR Power’By is the integration of SCANeR within the 3DEXPERIENCE platform to provide our customers the digital continuity they need for their projects.
Those functionalities are only available for Dassault Systèmes customers.
A user with a license provided by Dassault Systèmes, a 3DEXPERIENCE account and the connector for SCANeR will be able to launch SCANeR directly from the platform
SCANeR Power’By offers the possibility to save and open simulations to and from the platform.
A simulation is represented by a scenario and everything SCANeR needs to execute it on any computer or in the cloud (configuration and data).
A new menu is available for the 3DEXPERIENCE on SCANeR studio and SCANeR explore. Indeed, the user can create test plans and save them on the platform too.

All the simulations results can be visualized directly on the platform with Dassault Systèmes Tools.

MASSIVE SIMULATION
SCANeR compute
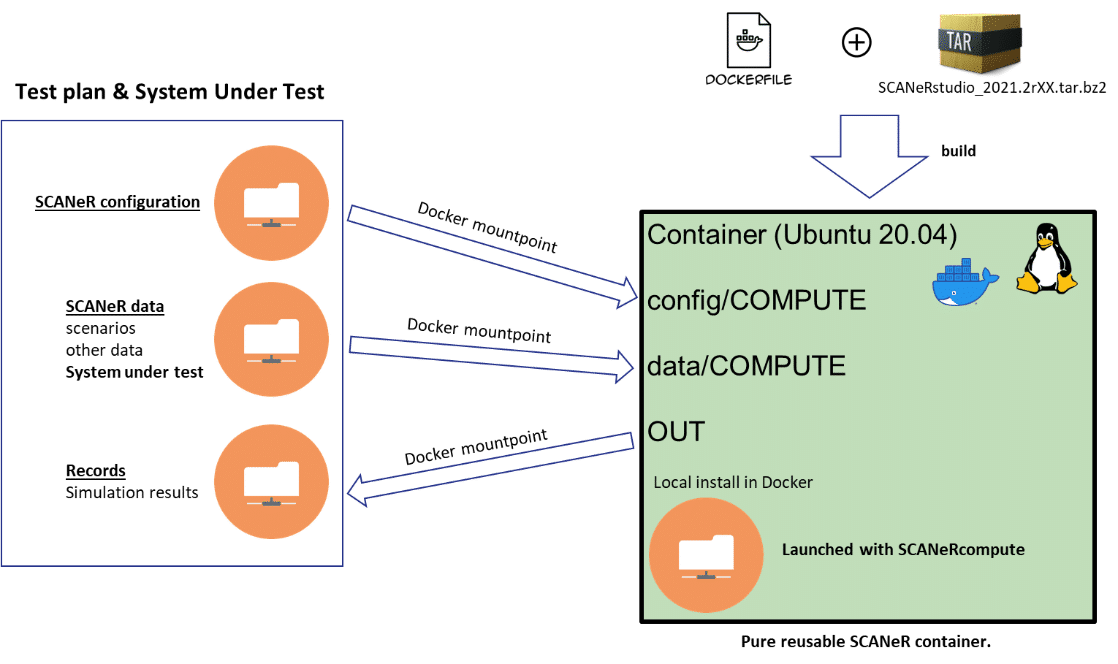
Docker support
To facilitate Cloud deployment, SCANeR now comes with a Docker template which can be used to generate docker images from the current SCANeR version, and is fully reusable and independent of the system under test.
By using docker mount points, configuration and data can be injected at runtime.
PLATFORM RECOMMENDATIONS
Hardware
| Minimal (for old system) | Recommended (for new systems) | |
| CPU | Intel Gen 6 or equivalent (Core i7-6800K) | Intel Core i7 11700K / i9 11900K Intel Xeon E/W AMD Ryzen 7 5800X / Ryzen 9 5900X AMD ThreadRipper Pro 3960X |
| RAM | 16 GB | 32/64 GB |
| Network | 1 Gbps | 1 Gbps |
| HDD(supervisor PC) | 500 GB | 500 GB SSD(>=1TB SSD for supervisor) |
| Graphic Board (Visual PC) | Quadro P5000 GeForce GTX 1080 | High End NVIDIA Quadro RTX A5000/RTX A6000 GeForce RTX 3080/RTX 3090 |
| OS | Windows 10 64bits | Windows 10 64 bits (21H2) |
| Monitor’s resolutions | Full HD (1920×1080) | 4K (3840×2160) |
Software
OS
Windows 10 64 bits
Linux (only for supported modules):
- Ubuntu 20.04 LTS
- Centos 7.9
Development
Visual C++ 2019 and 2015
Python: 3.9 on Windows, 3.8 on Ubuntu, 3.7 on Centos
Matlab Simulink 2016b and 2019b
Unreal Engine 4.27.2 (only for advanced customization or asset production)

